The research cruise was carried out with the 61 meter R/V Urania (Fig.8), owned and operated by SO.PRO.MAR. and on long-term lease to CNR. The ship is normally used for geological, geophysical and oceanographical work in the Mediterranean Sea and adjoining waters, including but not limited to, the Atlantic Ocean, the Red Sea, and the Black Sea.
R/V Urania is equipped with DGPS and SEAPATH positioning system (satellite link by FUGRO), single-beam and multibeam bathymetry and integrated geophysical and oceanographical data acquisition systems, including ADCP, CHIRP SBP and other Sonar Equipment, other than water and sediment sampling. Additional equipment can be accommodated on the keel or towed.
figure
The vessel was set-up for data acquisition and navigation with PDS-2000 software by RESON, interfacing by a multiserial and Ethernet link several instruments, among them the DGPS (Fugro), the Atlas-Krupp Deso-25 single-beam echosunder, the MAHRS MRU and the meteorological station. The position and depth data were also distributed to the CTD data acquisition console. A Kongsberg processor running the SIS software, collected the multibeam data, including a SEAPATH MRU, compass, and DGPS. The MBES was the 70kHz, 400 1x2°, 150°aperture EM-710 (2000 m range) model by Kongsberg, with sonar head positioned on the ship's keel using a V-shaped steel frame. A Sound Velocity probe at the keel 1m above the Sonar Head is interfaced directly to the MBES processor, thus providing the necessary real-time data for the beam-forming. CTD casts were used for input of the sound velocity profile to the system. An Anderaa Meteorological Station was also made available, at a rate of one measurement every 5 minutes.
CTD casts were taken throughout the surveyed areas, for sound velocity analysis, and were used for real-time MBES acquisition and post-processing. On the way from and to Italy, several Deep Blue XBT launches data were collected by a Sippican Mod. MK21 profiler.
The position of the XBT and CTD stations are reported in Table 3 and can be viewed in Fig.3 and Fig.4, respectively.
SBP data was acquired by the 16 transducers, hull mounted BENTHOS (DATASONICS) Mod.CAP-6600 CHIRP-II profiler, with operating frequencies ranging between 2 and 7 kHz. The pulse length was mantained at 20 ms while the trigger rates varied from 0.25 to 1 seconds according to water depth. Digital data acquired by the Communication Technology SWANPRO software were recorded in the XTF format on local disks and transferred on the network upon request. Backups were loaded on HD and DVD. The navigation data was made available to the system as lat/long by NMEA sentences of the DGPS receiver at a rate of aproximately 1 Hz or by the PDS200's NMEA at 1Hz. The XTF data were then converted to SEG-Y by the Triton-Elics's Xtf2Seg software. This latter data were then input to the ISMAR's SEISPRO software [Gasperini and Stanghellini(2009)] for data processing and display. Since the SEG-Y converted positions were found to be truncated, the accurate position data were recovered from the XTF headers by routines developed at ISMAR, and re-input to SEISPRO. The operation was also useful to check data integrity, other than for producing the navigation map and database.
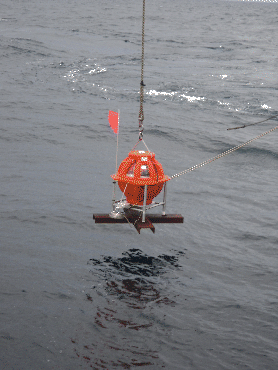
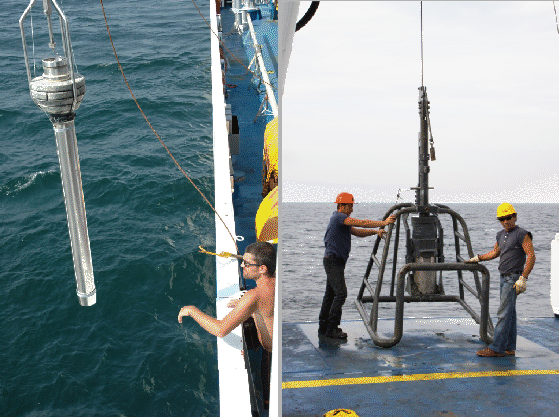
A number of 10 LotOBS Sercel OBS (designed by IFREMER, Fig.9), were deployed. Tabs.7 and Fig.5) show positioning data, and techicak specifications s are reported in Tab.8). LotOBS is specialised for seismological data acquisition, uses the same acquisition electronics as in the previously developped MicrOBS. In order to include sufficient batteries to be able to record for 8 months (during a deplyment period of up to 12 months) the instrument is housed in a 17 inch glass sphere with a weight in air of about 50 kg. The external 4.5 Hz geophones are deployed briefly after the arrival of the instrument on the sea-floor.
figure
|
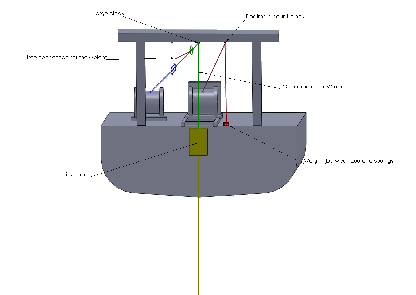
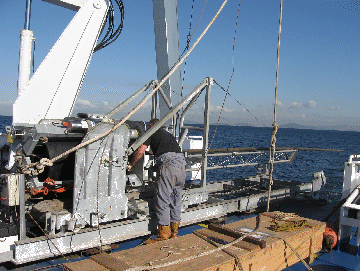
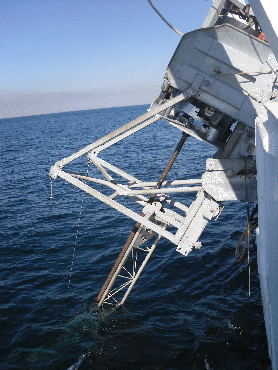
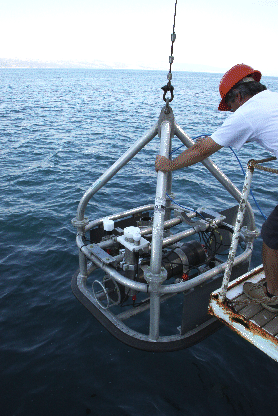
The IFREMER piezometer (V2) is a device to measure the differential pressure and temperature at different levels in the sediment, for long term duration periods, after wich system is recovered at surface by acoustic release. Its applications are relative to geohazards including slope stability and relations between seismicity and fluids. The deployment duration can be up to 2 years (batteries and memory). The system is deployed on the bottom by the ship in station, and released upon satisfactory check of its attitude, principally verticality, to assure proper functioning during the mission. The pipe and data logger head are handled and prepared for launch by a lodging device transported over a frame firmly secured to the ship stern's deck by steel angular, plates, T frames (See Fig.12, 13 and 14).
Its main specifications are:
figure
figure
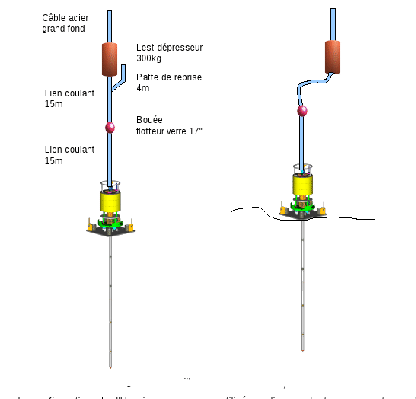
After installation of launch system on the deck of the R/V Urania, the piezometer deployment was firstly tested when ship was docked at Çannakale 2009-10-26. The operations on deck were performed by using the ship's main winch for the deployment and the SideScanSonar lateral winch laying Dynema and polyester ropes for the handling of the dead weight and buoy, as it is shown in the sketches of Fig.10 and 11. The final set-up was achieved by slight adjustements of the supporting frame on deck and of cable lengths from the auxiliary and main winch. The deployment of piezometers took place from 2009-09-27 up to 2009-09-30. After final checks of the selected sites by multibeam and CHIRP investigations , ship was put in station and the piezometer was : (a) put at 30-50m above the seafloor for 10 minutes for stabilization, (b) deposited on the seafloor, (c) decoupled from ship by delivering 30m of cable and (d) released after interrogation by acoustic modem with acceptable response on instrument's attitude and proper functioning. Table 10 gives detailed information on the whole operation.
Five Piezometers were deployed in the ÇinarcikBasin and near the SN4 site. Tab.9 and Fig.5 show the positioning data
figure
figure
figure
|
|
The INGV and TECNOMARE SN-4 observatory was developed in the framework of ORION (Ocean Research by Integrated Observatory Networks) EC project and deployed as node of ASSEM (Array of Sensors for long-term SEabed Monitoring of geohazards) EC project during a joint experiment in the Corinth Gulf (Greece, 400 m w.d.) in 2004 [Favali and Beranzoli (2008)], proving compatibility of GEOSTAR-class observatories with other networks.
All sensors installed on the observatory are managed by dedicated low-power electronics, able to perform the following tasks: (a) management and acquisition from all scientific packages and status sensors; (b) event detection; (c) preparation and continuous update of hourly data messages; (d) management of bidirectional communications via hydro-acoustic telemetry link (including transmission of seismic wave forms); (e) actuation of commands received (e.g., data request, system reconfiguration, restart) and (f) complete data back-up on internal memory. The SN-4 electronics can manage a wide set of data streams with quite different sampling rates tagging each datum according to a unique reference time set by a central high-precision clock.
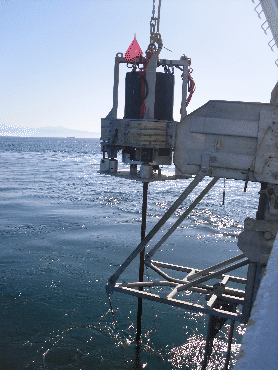
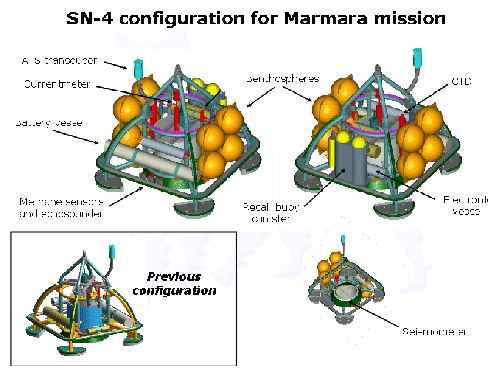
During its first mission in Corinth Gulf SN-4 was equipped with a 3-C broad-band seismometer, an hydrophone and a methane sensor, with one year autonomous operation with 12-V, 960-Ah lithium battery pack. To reduce disturbance of the frame and electronics, special devices were designed and implemented for installing the seismometer, which is lodged in a dedicated vessel integrated in a separate structure connected to the SN4 by a special mechanical release. To guarantee a good coupling with the sea bottom, the structure is disconnected just after the touch-down and kept linked to the frame by a slack rope. This method of seismometer installation proved to record higher quality data during all the GEOSTAR-class observatory missions. For the Marmara mission the configuration of the SN4 was modified, aiming at better quantifying the temporal relations between fluid expulsion, fluid chemistry and seismic activity along the NAF. The new payload and relevant sampling rates are summarised in Tab.11. The station will be deployed using ship's winch and an acoustic release like in ASSEM mission, but the recovery procedure was redesigned, i.e. station will be recovered by a rope released by an acoustic command, letting the operations be performed by ship-of-opportunity. To achieve this result, the total weight in water was reduced to 0.15kN (![]() 150 kg)from the 500kg in air by installing 8 benthospheres on the frame and adopting new lighter vessels for batteries and Electronics. This new fitting will make recovery and redeployment eeasier at the end of scheduled 6 months of activity . For future applications, SN-4 can be re-configured to operate as cabled observatory for permanent long-term real-time monitoring of the Marmara Sea to study relationship between fluids and seismicity.
150 kg)from the 500kg in air by installing 8 benthospheres on the frame and adopting new lighter vessels for batteries and Electronics. This new fitting will make recovery and redeployment eeasier at the end of scheduled 6 months of activity . For future applications, SN-4 can be re-configured to operate as cabled observatory for permanent long-term real-time monitoring of the Marmara Sea to study relationship between fluids and seismicity.
The configuration for the ESONET Marmara Mission (Fig.15) was as follows:
figure
During deployments, a hose was wrapped on the umbilical at the frame and to a surface pump for water sampling at interesting quotes or whenever dictated by Real Time data, especially increase in methane concentration.
figure
The sea bottom samples were collected with 1.2 Ton gravity corer (Fig.18), the ISMAR's Mod.SW-104 water/sediment corer [Magagnoli A. and Mengoli M. (1995)] (Fig.17) and with a box corer (Fig.17).
The sample locations are shown in Fig.6 and are reported on Tab.13
figure
figure
|
The WGS84 datum, the UTM35N projection and UTC were chosen for navigation and display, and for data acquisition. The time zone was set to the UTC for the instrumental data acquisition. The positioning maps and bathymetric images were produced with GMT [Wessel and Smith (1995)] and Globalmapper. The multibeam data were pre processed on board by the GMT software and ISMAR's routines and scripts, using the SIS production DTMS, after conversion to the ASCII format.
Bathymetric data were complemented by the IFREMER's DTM of Sea of Marmara [Le Pichon et al.(2005)]. On-land SRTM topography data was used for mapping, structural analysis, after conversion to NETCDF GMT grid files.
The computing center employed INTEL based PC running the GNU-Linux in addition to portable computer for data acquisition and personal processing. The Linux machines were used as data repositories using the SAMBA software, providing alse network services like WWW, DHCP and NAT.
Photographs and video were taken by digital cameras and video-camera by INGV dedicated personnel and by all participants.