The ship's NAVPRO 5.4 Navigation Software by Communication Technology of Cesena (Italy) was used ([5]). The primary positioning sensor was the FUGRO DGPS Mod. 3000 SeaStar. The system was used for ship's guidance on the planned lines, and for data logging of various sensors, among them gyrocompass, Atlas DESO 25 echo/sounder, meteo station, magnetometer, HPR transponder. In addition, it exported ship's position data to the Chirp sonar computer.
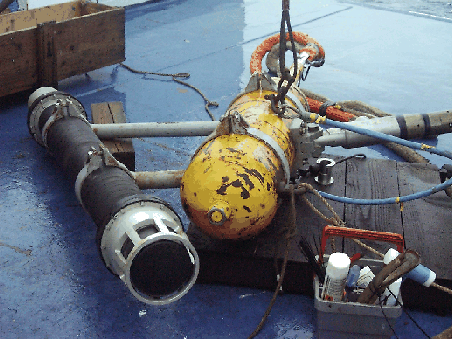
The system performed quite well within the technical specs, and without any problem to be reported. The availability of differential GPS signals by the FUGRO 3000 receiver ranged from good to excellent, and provided ship's position to metric accuracy for most of the acquisition time (DGPS corrections were unavailable for only short periods). Acoustic positioning of the TOBI vehicle was accomplished by using the ships' Simrad-Konsgberg HPR-1507 system and a long-range (6km) transponder, which was mounted 45 deg. below TOBI's depressor (Fig. 6).
The Navigation and Data Acquisition System had the following major settings:
Table 2 and Fig. 7 shows the offsets of principal instruments. It is worth to note that the POS 1 position is recorded in multibeam files, as well as in the NAVPRO binary and ASCII files. The final coordinates for every instrument should be recalculated accordingly.
![\begin{figure}
\makebox[\textwidth]{
\centerline{\epsfig{file=AZ99_offsets.eps,width=12cm}}}
\end{figure}](img11.png)