Although TOBI's main instrument is a sidescan sonar, a number of other instruments are fitted to make use of the stable platform TOBI provides. For this cruise the instrument complement was:
1. 30kHz sidescan sonar (Built by IOSDL) with swath bathymetry capability 2. 7.5kHz profiler sonar (Built by IOSDL) 3. Three axis fluxgate magnetometer. (Ultra Electronics Magnetics Division MB5L) 4. CTD (Falmouth Scientific Instruments Micro-CTD) 5. Gyrocompass (S.G.Brown SGB 1000U) 6. Pitch & Roll sensor (G + G Technics ag SSY0091)
An AutoHelm ST50 GPS receiver provides the TOBI logging system with navigational and time data. An MPD 1604 9 tonne instrumented sheave provides wire out, load and rate information both to its own instrument box and wire out count signals to the logging system.
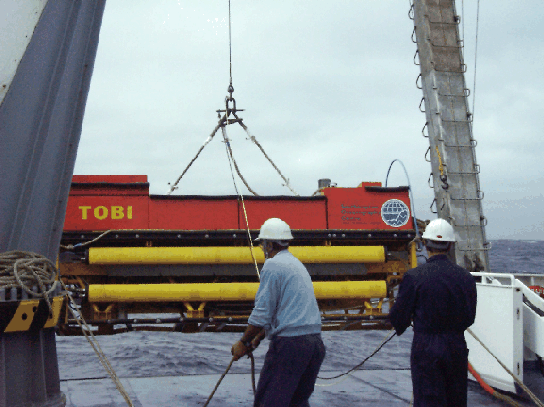
The TOBI system uses a two bodied tow system to provide a highly stable platform for the on-board sonars. The vehicle weighs two and a half tonnes in air but is made neutrally buoyant in water using syntactic foam blocks. A neutrally buoyant umbilical connects the vehicle to the 600 kg depressor weight. This in turn is connected via a conducting swivel to the main armoured coaxial tow cable. All signals and power pass through this single conductor.
For this cruise the SOC TOBI winch system, purchased using European funding, was utilised. This system combines tow, launch and umbilical winches onto one container- sized baseplate enabling one driver to control all operations. The winch was secured to the aft deck using the mounting bed frame designed by and manufactured by SO.PRO.MAR. S.p.A. - the ship's owners and used first on the TIVOLI expedition in 1998. During the surveys the winch was controlled by a remote station in the main laboratory.
In order to accurately navigate the TOBI vehicle the ship's Simrad HPR short baseline positioning system was used. The HPR1507 transponder beacon was fitted to the depressor weight in order to reduce any acoustic interference with TOBI. Appendix A presents a detailed report on the TOBI operations.
TOBI is a deep-towed multi-sensor sonar system developed at SOC (Southampton Oceanographic Centre)([3],[4]). The system comprises a two-sided 30kHz sidescan sonar, a 7.5kHz sub-bottom profiling sonar, a set of scientific instruments (magnetometer and CTD), and a range of vehicle attitude sensors (pitch, roll, and heading from a gyro-compass). The underwater vehicle is towed with a 200 m umbilical behind a depressor weight. The depressor is attached to the surface ship via the main 0.68" armoured coax cable. This towing method prevents ship induced heave influencing the vehicle. The vehicle is usually 'flown' at heights of between 200 to 500 m above the seabed. All signals to and from the vehicle are sent via the single coax conductor. Signals are processed on the ship and logged onto magneto-optical disks. The sidescan sonar has a total range of 6km and a has a seabed footprint ranging from about 4 x 7m close to the vehicle track to 42 x 2 at far range. The profiler sonar can penetrate up to 70m into soft sediments and has a vertical resolution of better than 1m.
Although originally designed for acoustically imaging the deep ocean floor, the TOBI system has developed into a highly versatile instrument used by both scientific agencies and commercial companies.