When towing the sensor, the cable may assume a shape which can be described by the well known catenary formula ([9]).
Herafter we will describe the procedure for calculating the best tow-fish position by the wire-out length and depth of the sensor.
In Fig.12 the analytical sketch of the problem is presented.
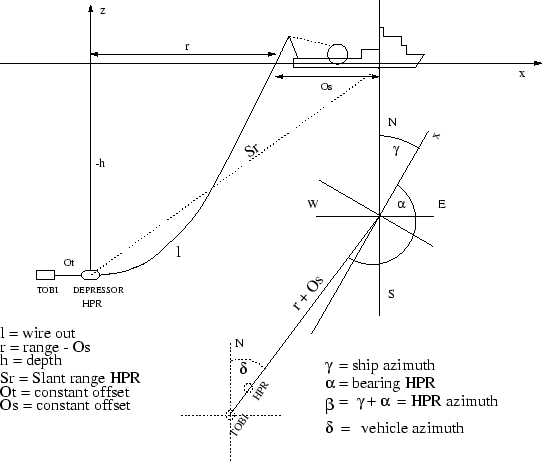 |
The catenary equation can be written as:
where h is the vehicle depth, a and b are parameters to be determined according to the boundary conditions. We assume that:
The cable length is :
In order to obtain an analitycal expression of Eq.3, we approximate the function z(x) of Eq.1 by a 2nd order Taylor expansion:
Given the boundary conditions in (2) we obtain:
Given the Eq.3 the length of the cable is
Let
![]() ,
therefore Eq.6 becomes:
,
therefore Eq.6 becomes:
Using Eq. 7 we are able to calculate the cable length given the range distance r and the vehicle depth h.
Given the cable length l0 and vehicle depth h, in order to solve the inverse problem, we use the Newton-Rapson iterative method, that is:
| f(r) = l(r)-l0 = 0 | (8) |
The value of r can be obtained by:
| (9) |
where ![]() indicates the
indicates the ![]() iteration, and
iteration, and
![$\displaystyle f^\prime(r) = \frac{r}{2} \Bigg\{\frac{1}{\sqrt{r^2+4h^2}} + \frac{1}{h} \ln \Bigg[\frac{2h+\sqrt{r^2+4h^2}}{r}\Bigg] +$](img28.png) |
|||
![$\displaystyle \frac{1}{2h(2h+\sqrt{r^2+4h^2})} \Bigg[ \frac{r^2}{\sqrt{r^2+4h^2}} - 2h - \sqrt{r^2+4h^2} \Bigg]\Bigg\}$](img29.png) |
(10) |
starting with the trial solution r(0)=h. The convergence of such aproximation to the desired solution r can be evaluated by the Banach's contraction mapping theorem:
the iteration is terminated when
![]() is sufficiently small.
is sufficiently small.


![$\displaystyle l(r) = \frac{1}{a} \int_0^r \sqrt{a^2+x^2}dx =
\frac{1}{2} \Bigg\...
...r^2+4h^2} + \frac{r^2}{2h} \ln \Bigg[
\frac{2h+\sqrt{r^2+4h^2}}{r}\Bigg]\Bigg\}$](img24.png)