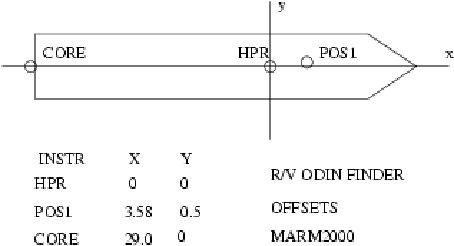
The cruise was conducted with R/V Odin Finder (Fig.4), a 56m long ship owned and operated by GAS (the technical specs are presented in Appendix 1).
The Positioning system NAVPRO V5.53 by Communication Technology (Cesena, Italy) was used. The instrumental offsets are presented in Fig. 4. The integrated system used an Anshütz Standard 20 Digital Gyrocompass, a TSS Dynamic Motion Sensor, a USBL Simrad HPR 410 P and a Trimble 4000 Differential Locator, with a DGPS Satellite link by Skyfix of RACAL-NESA. The datum was WGS84 antthe Direct Mercator projection on 41 30.00'N was chosen for navigation and display.
figure
figure
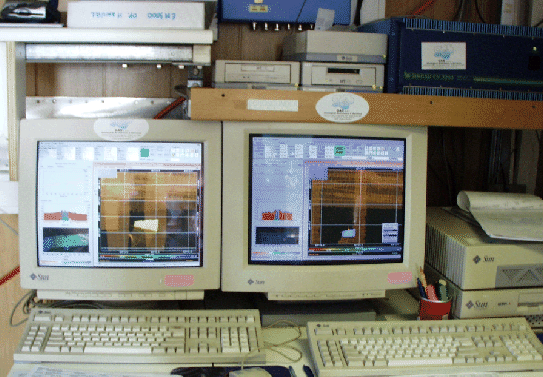
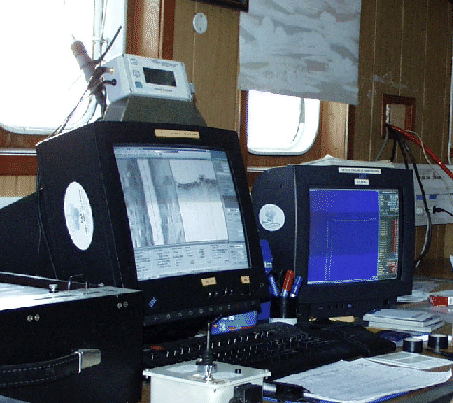
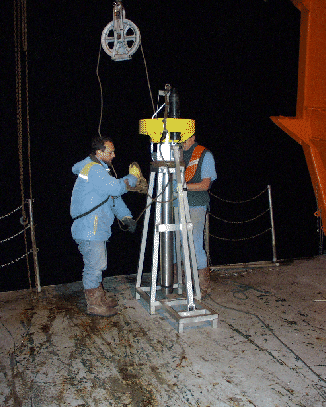
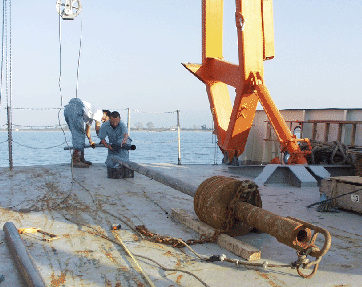
We collected morphobathymetric data with Kongsberg-Simrad's EM300 and EM3000 multibeams (Fig.7). The planning and real-time acquisition were performed by Kongsberg-Simrad's MERLIN workstations. The onboard processing was done by Kongsberg Simrad's NEPTUNE and LDEO's MBSYSTEM. The Sound Velocity Profiles were taken by Sippican's XCTD/XBT and SBE SEACAT (Fig.8) profilers. SBP data and Side Scan Sonar data were provided by a Datasonics Chirp SIS 1000 SSS/SBP integrated system, which is shown in Fig.9 and FIG.4. The fish positions (Direct Mercator on 41.5N) were delivered to the ISIS/TRITON workstation by NAVPRO, after interrogation of the HPR transponder. The positioning maps were done with GMT [4]. The sea bottom was sampled with IGM's corer Mod. SW104 [2](Fig.10), a 'Kullenberg' gravity corer (Fig.11) and 'Van-Veen' grab sampler (Fig.12).