The RDI Mod. Workhorse 300Khz and Ocean Surveyor 75Khz ADCP were used. The data were collected by the VMDAS software Version.
The ADCP system on the RV Urania is formed by two ADCPs, an Ocean Surveyor 75KHz , able to investigate the current field up to about 600 m and a WorkHorse 300KHz resolving the surface layers up to 95 m, both manufactured by RDI. During our experiments OS was configured in Narrow Bandwidth mode, a processing method which uses low-pass filters to measure the returned Doppler energy spectrum, differently the WH operated in Broad Bandwidth mode. Navigation data (positions) are provided by a differential GPS system, and the ship's heading is provided by an analog gyro signal coming from the conventional compass of the ship. The ship's heading is needed to transform the flow relative to the transducer into earth coordinates. To remove spurius contamination from gyro signal, such as the Schuler oscillations, an independent measurement of heading was performed using a 3-D Ashtech-GPS system ADU2. ADCP data were collected from the OS75 profiler every 3 s in 45 vertical bins of depth 16 m. The WH300 profiler collected data every 1 s in 40 vertical bins with a vertical resolution of 4 m. Both the transducers were located behind an acoustic window in a wall of the ship's keel, at 3.5 m below the surface. The data acquisition was controlled by the RDI VMDAS software package. The bottom track was activated only when the ship was sailing in shallow water. Data were processed using the Common Oceanographic Data Access System (CODAS V3.1) developed and maintained by a group from the University of Hawaii [Firing (1995)]. The settings are shown in Tab.6.
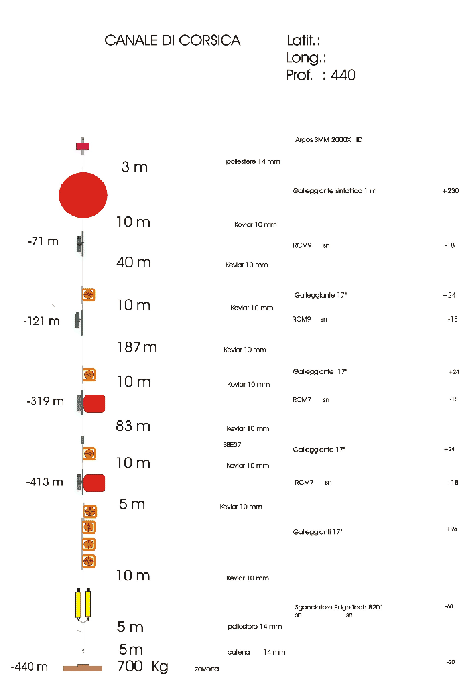
An oceanographic mooring located E of the Capraia I. was successfully recovered on 2005-04-14. The mooring design is presented in Tab.7 and in Fig.12.
An oceanographic mooring located W of the buoy ODAS ITALIA1 was successfully recovered on 2005-04-18. The mooring design is presented in Tab.8. Figures 13 and 14 show operations on deck.
figure
figure
figure
After maintenance and data download, the mooring was deployed with the same configuration. The mooring was working since 2004-09-22 other than from 2003-09-13 to 2004-05-26.
Data collected integrate those from buoy ODAS and are used for the study of air-sea interaction and dynamics of the upper thermocline.