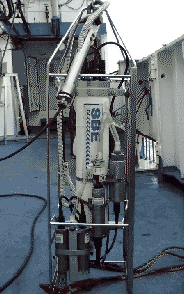
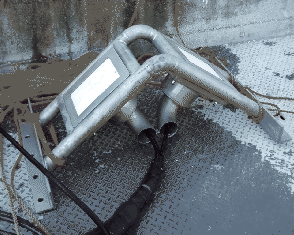
We collected morphobathymetric data with ELAC/SEABEAM 1180 multibeam (Fig.8 and 9). The transducers were positioned on a V shaped frame (Fig. 10,11) that was secured by a diver on two T frame displaced 50 cm each apart of the central line on the hull of the ship, between construction frames N. 65 and 66. The setting of the system employed also a Meridian Surveyor SG-BROWN (Fig.12) gyrocompass, who was lined up parallel to the central line of the ship and a TSS Mod. xxx MRU. This latter was interfaced to the Trimble DGPS and to the gyrocompass. The real-time acquisition were performed by an ELAC's Hydrostar software (version 4.xx) on a dual-PIII workstation running the NT O.S.. The system was directly interfaced to the DGPS, the TSS and to the Gyrocompass. The Sound Velocity data were taken by the Sea Bird SBE-11 PLUS (Fig.13) profiler, and input to the system after reformatting the file provided by the SBE software. The onboard processing was done by LDEO's MB-SYSTEM [15] on a GNU-LINUX workstations.
The TSS was calibrated after a 15 minutes acquisition with ship running 5 KN in calm sea. After the statistical procedure included on the TSS software, the values found where:
The offsets of the multibeam (respect to POS1, see Tab.3.1) were input on the Hydrostar Software. Table 4 reports the data (file Ships Parameter) according to ELAC's sign conventions (positive directions are X: port Y:ahead Z: down):
The draught of the ship varied with the bunker consumption as shown on Table 5.
|
 |
 |
The multibeam data from the ELAC 1180 sonar were recorded on HD on the system's consoles. The recording format were the ELAC (.dat,.inf), the XSE and the UNB. In addition to this, they were also put on a separate computer for backup on HD and DAT tapes. This latter computer served the data on an NFS backbone to the two processing computers, that ran MB-SYSTEM and the ELAC HDP PostProcessing Software. The first data processing on board used MB-SYSTEM. A total reprocessing will be done using MB-SYSTEM, GMT and IFREMER'S CARAIBES.