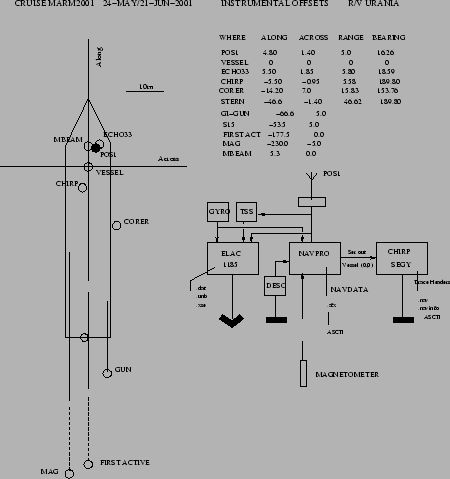
The Positioning system NAVPRO V5.6 by Communication Technology (Cesena, Italy) was used. The instrumental offsets are presented in Fig. 7 and in Tab. 3.1. The integrated system used a Microtecnica and a Meridian Surveyor SG-BROWN (see below) Gyrocompasses,and a Trimble 4000 Differential Locator, with a DGPS Satellite link by FUGRO. The datum was WGS84 and the Direct Mercator projection on 41 30.00'N was chosen for navigation and display. Timing was set to UTC. The acquisition rate was set to 10 secs. The SBP-CHIRP workstation received the 'VESSEL(0,0)' positions by the NAVPRO serial output. These positions were therefore recorded on the SEGY trace headers. The speed of Sound for DEPTH 1 and 2 was set to 1500m/sec, with a transducer immersion of 3.8m. The NAVPRO computer interfaced also an ANDERAA metereological station and a Conductivity/Temperature sensor on the keel (depth of 3.5m), whose data were collected at the same rate of above.
figure