IGM's GEM Systems Mod. GSM-19MD Overhauser Effect Magnetometer was used ([6]). The sensor was towed at a constant offset of 185 m from ship's stern. Data were recorded at the rate of about 0.1 Hz by the NAVPRO navigation system.
The instrument performed well for the totality of the cruise.
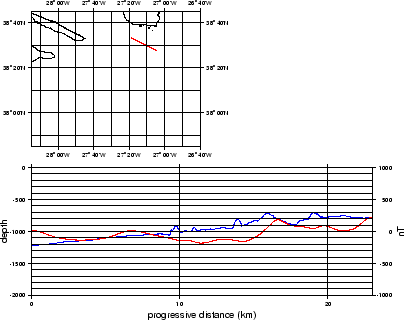
The magnetic data of the survey were collected by the NAVPRO navigation computer, along with date, time (UTC), DGPS coordinates, gyrocompass, bathymetry (DESO 25). A procedure was set to make a first display of the data by means of:
This served primarily for data inspection. An example can be seen in Fig. 9. The TOBI vehicle carried a 3 component magnetometer, that acquired data at 1/8th of TOBI data (4 seconds). For an initial check we used the data extracted from the header of TOBI data.