



Next: Bathymetry
Up: MATERIALS AND METHODS
Previous: MATERIALS AND METHODS
Contents
The Navigation system NAVPRO V5.6 by Communication Technology of Cesena was used.
The positioning sensor was the FUGRO 3000L 12 channel GPS receiver, with a OMNISTAR
DGPS Satellite link by FUGRO. The integrated system used a Robertson
model Skr82 gyrocompass, and was used for navigation and sensor data logging,
other than for the fixed distance seismic shot control.
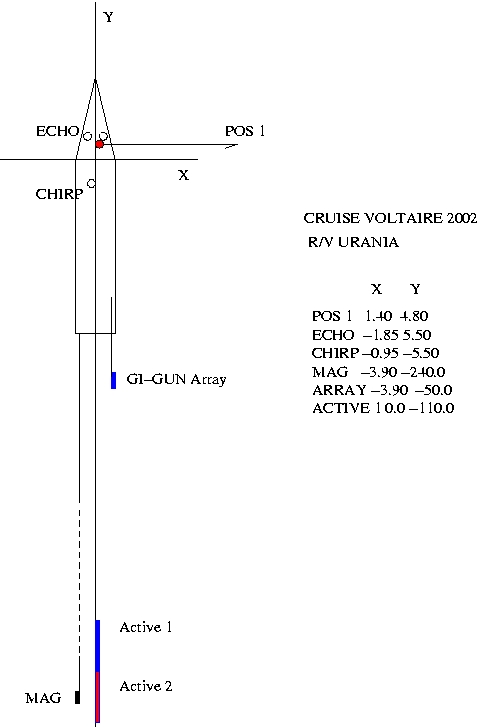
The instrumental offsets are presented in Tab. 1 and in Fig. 9.
Table 1:
navigation offsets (m) on R/V Urania for NAVPRO. Positive directions are X:starboard, Y:ahead, Z:up. Point of ZERO offset VESSEL (0,0) is located on the ship's main mast behind the command brifge. POS1 = primary positioning system of main GPS antenna.
| WHAT |
X |
Y |
Z asl |
| VESSEL Zero Offset |
0.00 |
0.00 |
0.00 |
| POS 1 ANTENNA |
1.40 |
4.80 |
15.0 |
| ECHO 12 |
-1.85 |
5.50 |
-3.50 |
| ECHO 33 |
1.85 |
5.50 |
-3.50 |
| CHIRP |
-0.95 |
-5.50 |
-3.50 |
| MAG |
-3.90 |
-240.0 |
3.0 |
| GI-GUN ARRAY |
3.90 |
-50.0 |
-6.0 |
| ACTIVE 1 |
0.00 |
-110 |
-10.0 |
|
figure
Figure 9:
Instrumental Offsets on R/V Urania for cruise V2002
 |
The water depth was measured by two ATLAS-KRUPP DESO 25 (the speed of sound
was set to 1500 m/sec). The total magnetic field was measured by a model G-811 GEOMETRICS proton-precession magnetometer, deployed at a depth of 3 m.
The model ADU-2 ASHTECH attitude measurement system and
models OS-75 and WHM-3000 RDI ADCP current meters provided additional high quality positioning
data, such as heading and speed, that were recorded on separate logging systems.
Next: Bathymetry
Up: MATERIALS AND METHODS
Previous: MATERIALS AND METHODS
Contents
2003-01-21