The ship's NAVPRO 5.4 Navigation Software by Communication Technology of Cesena was used (URL: http://www.comm-tec.com). The primary positioning sensor was the RACAL DGPS SKYFIX SPOT BEAM with a 12 channel Trimble receiver. The system was used for ship's guidance on the planned lines and targets, and for data logging of various sensors, among them the ANSHUTZ gyrocompass Mod. Standard 20 and the GEM magnetometer. In addition, it routed positioning data to the Seismic and Gravimetric Laboratory, for additional data logging. The system performed quite well. The availability of Differential GPS signals by the RACAL receiver was good, thus allowing metric accuracy for almost the totality of the acquisition time. Very few position spikes were detected and removed easily by the post-processing sequence of the swath bathymetry and magnetics data.
The Navigation System had the following major settings:
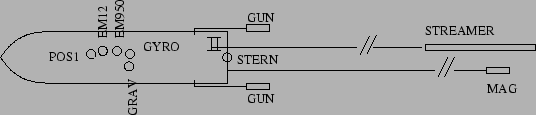
The Navigation System Time (NAVPRO) had a variable delay against GMT+1 as taken by the GPS receiver. Table 11 in Appendix 6.4 reports the delays. On almost the totality of the cruise the DGPS corrections were provided by the RACAL Station of Rome (code 800). In a very few occasions we turned to the Station of Ankara (code 830) due to problems in Rome. Tab. 5 and Fig. 13 shows the offsets of principal instruments. It is worth to note that on Multibeam files the POS 1 position is recorded, as well as on the NAVPRO binary and ASCII files. That is, the final coordinates for every instrument have to be recalculated accordingly.
figure