|
|
|
|
|
PROGETTO FIUME PO Acquisizione di dati, sperimentazione di metodologie geofisiche e valutazione del loro impatto ambientale sul Fiume Po |
||
|
|
|
|
|
PROGETTO FIUME PO Acquisizione di dati, sperimentazione di metodologie geofisiche e valutazione del loro impatto ambientale sul Fiume Po |
||
CAPITOLO 3: RILIEVO BATIMORFOLOGICO
3.1 Obiettivi della Ricerca 3
3.2 Area del Lavoro 4
3.3 Periodo di Lavoro e Personale 5
3.4 METODOLOGIE OPERATIVE E STRUMENTAZIONI 6
3.4.1 Acquisizione dei dati batimetrici a scansione laterale: sistema interferometrico “Swath Bathymetry” 6
3.4.2 Acquisizione dei dati batimetrici: ecoscandaglio 11
3.4.3 Calibrazioni 11
3.4.4 Acquisizione dei dati morfo-stratigrafici: sistema “Side Scan Sonar” & “Sub Bottom Profiler” tecnologia “Chirp” 19
3.4.5 Acquisizione dei dati stratigrafici: sistema “Uniboom” 23
3.4.6 Acquisizione ed elaborazione della cartografia di base 24
3.5 RISULTATI E CONCLUSIONI 27
3.5.1 Elaborazione dati batimetrici e riporto al datum s.l.m. 27
3.5.1.1 Descrizione dei dati batimetrici 39
3.5.2 Morfologia 43
3.5.2.1 Forme di fondo 46
3.5.2.2 Aree in erosione 62
3.5.2.3 Aree di accumulo 64
3.5.3 Stratigrafia 67
Il rilievo batimorfologico è stato indispensabile per la pianificazione della campagna di sismica multicanale, dovendo individuare il canale navigabile in continuo per un mezzo trainante un cavo sismico di circa 800 m, alla profondità di 6 m. A tale scopo si è impiegata strumentazione ad alta e altissima risoluzione per ottenere: (a) dati batimetrici a scansione singola e laterale (“multi-beam”), (b) immagini acustiche del fondale, e (c) dati sismo-stratigrafici dei primi metri del sottofondo.
Tali dati risultano di particolare utilità per gli enti competenti in materia fluviale quali ARNI (Azienda Regionale per la Navigazione Interna), Magistrato per il Po, Autorità di Bacino del Fiume Po, oltre ad avere interesse di ricerca scientifica. Inoltre, essi sono collocati in un quadro di riferimento omogeneo e documentato, in grado di permettere ulteriori rilievi e confronti nel tempo.
I rilievi hanno interessato un’area che si estende dal delta del fiume Po da Pila fino ad Ostiglia, con risalita e ridiscesa, secondo rotte concordate con ARNI per un totale di circa 300 Km di linee percorse (Tav. 3.2). L’imbarcazione appositamente attrezzata, S/V “Maria Adelaide” (Fig. 3.2), ha seguito la navigazione stabilita da ARNI ed indicata lungo il fiume da segnali di sponda, segnali in alveo e segnali sui ponti indicanti la campata navigabile.

Fig. 3.2 - S/V “Maria Adelaide attrezzata per il rilievo batimorfologico
Il rilievo è stato eseguito nel periodo compreso tra i giorni 21 e 30 settembre 1996 dalla Società G.A.S. (Geological Assistance & Services) di Bologna e con la supervisione dei tecnici ARNI e ENI-Div. Agip.
In particolare la squadra che ha operato sia a terra che a bordo del mezzo navale era composta da un navigatore, un ingegnere elettronico, un tecnico elettronico, un operatore “Chirp”, un operatore “Swath Bathymetry”, due “shoremen” e due supervisori ENI-Div. Agip.
I moderni sistemi di scandagliamento acustico laterale per prospezioni batimetriche (“multi-beam”), permettono ad un mezzo in movimento di ottenere dati con elevata risoluzione spaziale e verticale su strisce larghe da 1-2 volte fino a 10 o più volte la profondità dell’acqua sotto il trasduttore. Una piastra “sonar” emette verso il fondo un impulso a frequenze acustiche o ultra-acustiche, molto stretto nel verso di avanzamento, e molto largo lateralmente. L’analisi degli echi di ritorno (ampiezze e/o fasi) sui fronti della piastra “sonar”, che è organizzata in singoli trasduttori o bande di trasduttori, e la misura dei tempi dalla emissione dell’impulso, forniscono i dati per la assegnazione delle corrette coordinate spaziali ad ogni punto sul terreno illuminato dal fascio. I tempi di percorso vengono convertiti in distanze conoscendo la velocità di propagazione del suono in acqua, tenendo conto anche degli eventuali effetti di “ray-bending” dovuti al percorso del segnale in strati d’acqua a diversa velocità di propagazione (per questa ragione è indispensabile avere una buona misura di tale parametro su tutta la colonna d’acqua). La misura degli angoli può avvenire in diversi modi, fra cui: (a) per misura delle intensità (massime o minime) prodotte dallo stesso segnale su due bande di trasduttori, o (b) per acquisizione diretta delle fasi dei segnali, con tecniche interferometriche, misurandole su bande diverse di trasduttori relativamente ad un segnale di riferimento. Il riconoscimento tramite ampiezza è generalmente valido per aree non troppo distanti lateralmente, dove gli angoli di ritorno sono alti, ed una buona parte del segnale emesso viene riflesso. Viceversa, nei settori più lontani della strisciata, i segnali ritornano ad angoli sempre più bassi verso la nave, e, quindi, con intensità decrescenti. L’analisi delle fasi si rivela in queste situazioni l’unico mezzo possibile per riconoscere gli angoli. Inoltre, l’utilizzo di tale tecnica permette una spaziatura molto più fitta dei punti campionati, grazie alle molto minori ambiguità nella misura.
Una volta che per ogni singolo fascio sono stati assegnati angolo e tempo di ritorno, un sistema di elaborazione in tempo reale o in “post processing”, che conosce la posizione del trasduttore ad ogni istante, è in grado di calcolare per ogni punto sul terreno illuminato dal fascio le rispettive coordinate spaziali. Trattandosi di una piattaforma in movimento in acqua, e quindi soggetta a variazioni di posizione nel tempo, i sistemi sono accoppiati a unità di riferimento (“Motion Reference Unit”, MRU) in grado di fornire istante per istante le inclinazioni dalla propria verticale e le accelerazioni del mezzo. Una girobussola viene impiegata per dare la misura dell’angolo rispetto al Nord. Tali dati sono riportati nel sistema di riferimento del trasduttore, e le posizioni dei segnali di ritorno sono assegnate convertendo in distanze i tempi, e correggendo gli angoli delle misure fornite dalla MRU.
Questi dati (XYZ) devono essere ulteriormente filtrati e corretti (generalmente per la eliminazione di dati spuri o inattendibili, per la marea, per errori di posizionamento, per errori nel calcolo della velocità del suono in acqua, ecc.). Una volta corretti, essi sono utilizzati per la costruzione di “Digital Terrain Models” (DTM), tramite, ad esempio, la loro interpolazione su superfici a griglia regolare.
Il rilievo batimetrico nel fiume Po è stato effettuato con il sistema a scansione laterale interferometrico ISIS 100 SUBMETRIX (Fig. 3.4.1a e 3.4.1b), che ha permesso l’acquisizione di dati su una strisciata di alveo di larghezza variabile da 25 a 75 metri per lato.
Questo sistema è in grado di fornire una elevatissima copertura di misure del fondo (da 1000 a 20000 punti per strisciata). Durante la presente indagine lo strumento ha fornito 10000 punti per ogni strisciata, essendo il trasduttore orientato a 30°. La memorizzazione delle intensità dei segnali di ritorno dai singoli punti può produrre immagini “Side Scan Sonar” di alta qualità e prive di distorsioni geometriche.
Fig. 3.4.1a - Sistema interferometrico “Swath Bathymetry”

Fig. 3.4.1b - Sistema interferometrico “Swath Bathymetry” ISIS 100 SUBMETRIX
Il trasduttore ISIS 100 è stato installato a lato del natante ed immerso uno o due metri per evitare gli effetti della turbolenza (fig. 3.4.1c).
Il sistema è stato interfacciato: (a) alla MRU TSS Mod. DM-05, per correggere l'errore delle quote rilevate dovuto ai movimenti verticali del natante (“pitch”, “roll”, “heave” ed “yaw”), (b) alla girobussola Robertson RSC650, che ha fornito i dati di direzione rispetto al nord geografico, e (c) al DGPS TRIMBLE 4000.
La velocità del rilievo è variata da 3 nodi in fase di ascesa a 5 nodi in fase di discesa.
Il sistema ha operato con un “software” SUBMETRIX installato su una “Workstation SUN”, che ha provveduto al controllo di qualità in tempo reale e alla memorizzazione dei dati su disco magneto-ottico.
Fig. 3.4.1c - Posizioni relative all’antenna di posizionamento dei trasduttori delle strumentazioni a bordo della S/V “Maria Adelaide
I dati di batimetria sono stati inoltre acquisiti in continuo utilizzando un ecoscandaglio idrografico SIMRAD EA300P, operante simultaneamente alla doppia frequenza di 34 e 200 kHz.
L’uscita digitale dell’ecoscandaglio è stata interfacciata al sistema di navigazione, assicurando così la precisa posizione di ogni misura di profondità.
Tutti i parametri di “set-up” dell’ecoscandaglio (durata dell’impulso, guadagno, attenuazione, ecc.) sono stati plottati sulla registrazione grafica ogni 10 “fix”. Tali parametri sono riassunti come segue:
- guadagno: 2 db ¸ 5 db
- attenuazione: -15 db
- power: 1-10 W
La profondità di immersione del trasduttore, compatibilmente al mezzo navale, è stata impostata da 0.5 m ad 1 metro (Fig. 3.4.1c). Sullo strumento è stata impostata una velocità del suono ricavata dalle misure dirette (vedi § 3.4.3).
Per verificare le componenti di errore che influenzano il dato batimetrico in acquisizione e in fase di elaborazione si effettua la calibrazione del sistema, in tutte le sue componenti principali: interferometro, MRU, girobussola. Inoltre, è stata misurata la velocità del suono in acqua.
Girobussola
La prima verifica e rettifica dello strumento viene effettuata dalla Casa Costruttrice che garantisce e certifica il corretto funzionamento dello strumento. Per questo motivo lo scopo della calibrazione che viene eseguita prima dell’inizio delle operazioni è la verifica del corretto funzionamento della girobussola e la determinazione degli “offset” angolari da inserire nel software di navigazione per ottenere il dato di “heading” corretto.
Una volta collocata e fissata la girobussola in linea con l’asse della nave, la calibrazione viene eseguita in porto a mezzo di due “Total Station”. Prima di iniziare la calibrazione devono trascorrere almeno tre ore dall’accensione della girobussola per permettere alla stessa di raggiungere la piena stabilizzazione.
Il sistema di navigazione a bordo viene predisposto in modo da registrare gli angoli di correzione. I prismi vengono posizionati a prua ed a poppa del mezzo navale.
Le due “Total Station” vengono collocate su due punti topografici noti in porto ottenuti topograficamente in modo che da ognuno sia visibile un prisma (di poppa e di prua). Si effettuano 30 letture dei due prismi simultaneamente per un periodo di un ora in modo da ottenere la direzione dell’asse prua - poppa del mezzo navale dal lato destro. Allo stesso tempo si registrano i valori digitali forniti dalla girobussola sul computer di navigazione.
Effettuato un primo controllo manuale sugli scostamenti angolari per verificare che i dati siano accettabili, si ruota il mezzo navale di 180°, si attendono altre tre ore per avere la certezza che la girobussola si stabilizzi e si procede poi nello stesso modo ottenendo però la direzione dell’asse prua - poppa dal lato sinistro.
Comparando i dati ottenuti topograficamente e quelli ottenuti direttamente dalla girobussola si ottengono valori di correzione per ogni lettura: mediando questi ultimi si ottiene il valore di correzione angolare D da inserire nel “software” di navigazione.
Le operazioni di calibrazione della girobussola sono state effettuate il giorno di inizio del rilievo batimorfologico (21/09/96) in località Po di Pila, e ripetute il giorno 27/09/96 in località Pontelagoscuro.
“Swath Bathymetry”
La calibrazione in campo si effettua per verificare le componenti di errore che influenzano il dato batimetrico in acquisizione e “processing”.
Le componenti di errore sono riassunte nella seguente tabella 3.4.3a:
|
Misurazione |
Misurato da |
Cause d’errore |
Effetto relativo sulla profondità |
|
Roll |
MRU (Motion Reference Unit) |
Non allineamento tra trasduttori ed MRU |
Forte |
|
Pitch |
MRU |
Non allineamento tra trasduttori ed MRU |
Debole |
|
Heading |
MRU e bussola |
Non allineamento tra trasduttori ed MRU, e bussola. Offset magnetico sulla bussola |
Medio |
|
Heave |
MRU |
Funzionamento della MRU, misura imprecisa degli allineamenti |
Medio |
|
Posizione |
Sistema di posizionamento |
Offset ed errori di posizionamento, offset temporale nell’acquisizione dei dati di posizionamento |
Forte |
Tab. 3.4.3a - Calibrazione “Swath Bathymetry”
Per i dettagli di calibrazione si fa riferimento al documento “ISIS Calibration Procedures” issue 1.0 19 September 1996 Submetrix Ltd.
Le indicazioni generali sono riassunte nella seguente tabella 3.4.3b.
In accordo con la procedura riportata nella tabella suddetta la calibrazione è stata effettuata durante la giornate del 21 e 30 settembre, ad inizio e fine rilievo.
|
Misurazione di calibrazione |
Misure prima del rilievo |
Azioni dopo il rilievo |
Note |
|
Offset angolare tra Girobussola e mezzo navale |
Autocalibrazione o/e calibrazione in porto, confronto con autopilota |
Confrontare con course-made-good |
Tenere in considerazione la convergenza del grid. |
|
Offset angolare di Roll tra Trasduttori ed MRU |
Cinque linee parallele ed equidistanti (5 volte la profondità) con direzione alternativamente opposta, uguale velocità, su fondale piatto. |
Programma ISIS di calibrazione postprocessing |
Offset tra la verticale della MRU e l’angolo nominale dei trasduttori |
|
Offset temporale tra navigazione e ISIS |
Una linea su fondale con target identificabili, percorsa più volte nella stessa direzione con diversa velocità. |
Al variare della posizione dei target si quantifica l’offset. Confrontare la posizione degli elementi su carte di ogni linea |
Principalmente ritardi di tempo tra posizione e acquisizione |
|
Offset angolare di Pitch tra Trasduttori ed MRU |
Percorrere la stessa linea nelle due direzioni, con la stessa velocità su un fondale con elementi identificabili |
Al variare della posizione dei target si quantifica l’offset. Confrontare la posizione degli elementi su carte di ogni linea |
L’effetto è trascurabile considerando l’accuratezza di posizione in acqua bassa (<20 m) |
|
Offset angolare tra MRU e Girobussola |
Percorrere la stessa linea nelle due direzioni, con la stessa velocità su un fondale con elementi identificabili allineati o con un solo target allungato |
Al variare dell’orientamento dei target si quantifica l’offset. Confrontare la posizione degli elementi su carte di ogni linea |
Allineamento dell’azimuth dei trasduttori “sonar” e errore strumentale |
|
Profondità |
Percorrere linee perpendicolari. Confrontare con ecoscandaglio. Provare una sonda CTD |
Preparare grid separati per linee perpendicolari. Usare funzioni differenti nel processing del grid o creare grid differenti. |
Attenzione alle profondità minime dello ecoscandaglio nel selezionare gli algoritmi |
Tab. 3.4.3b - Calibrazione “Swath Bathymetry”
Attraverso il metodo del BAR CHECK di seguito descritto è stata determinata la velocità del suono in acqua per diverse profondità ed i valori ottenuti sono stati inseriti nel “software” di “processing” del sistema ISIS 100.
Ecoscandaglio: metodo del “bar-check”
Una piastra a base quadrata di spigolo pari a 60 cm sostenuta da una catena che presenta suddivisioni centimetriche è stata immersa in acqua al di sotto del trasduttore dell’ecoscandaglio in modo tale da poter essere vista dal trasduttore stesso. Le profondità di immersione sono state fissate a 5 m, 10 m, 15 m, 20 m. Operando sulle impostazioni di velocità del suono in acqua sulla “consolle” dell’ecoscandaglio, si è proceduto nelle misure fino ad ottenere il valore corretto di profondità. La stessa operazione si è ripetuta per le varie profondità di “check” per almeno due volte su ciascuna profondità. Sui valori di velocità così ottenuti si calcola una media aritmetica ed il valore risultante è quello da impostare nello strumento. Ricordiamo che il sistema ISIS 100, invece, usa tutti i valori letti alle varie profondità. Naturalmente questa procedura impone, per una misura corretta e accettabile statisticamente, la ripetizione delle operazioni in più punti ed in diversi momenti della giornata. Per quanto riguarda il caso in esame il metodo del BAR CHECK è stato ripetuto almeno due volte al giorno, all’inizio e al termine della giornata di lavoro, come mostrato nella tabella seguente 3.4.3c.
|
DATA |
ORA |
LOCALITA’ |
VELOCITA’ DEL SUONO |
|
21/09/96 |
9.00 |
Po di Pila |
1484 m/s |
|
|
17.45 |
Cà Venier |
1476 m/s |
|
22/09/96 |
9.00 |
Cà Venier |
1480 m/s |
|
|
18.15 |
Bottrighe |
1440 m/s |
|
23/09/96 |
7.20 |
Bottrighe |
1470 m/s |
|
|
18.00 |
Pontelagoscuro |
1470 m/s |
|
24/09/96 |
7.20 |
Pontelagoscuro |
1460 m/s |
|
|
17.30 |
Felonica |
1478 m/s |
|
25/09/96 |
7.30 |
Felonica |
1478 m/s |
|
|
17.40 |
Melara |
1456 m/s |
|
26/09/96 |
7.40 |
Melara |
1484 m/s |
|
|
19.45 |
Revere |
1460 m/s |
|
27/09/96 |
7.30 |
Revere |
1482 m/s |
|
|
17.30 |
Pontelagoscuro |
1472 m/s |
|
28/09/96 |
7.20 |
S. Maria Maddalena |
1464 m/s |
|
|
17.30 |
Bottrighe |
1440 m/s |
|
29/09/96 |
8.30 |
Bottrighe |
1450 m/s |
|
|
19.00 |
Cà Tiepolo |
1460 m/s |
|
30/09/96 |
7.00 |
Cà Tiepolo |
1450 m/s |
|
|
16.30 |
Cà Tiepolo |
1470 m/s |
Tab. 3.4.3c - Luoghi e date del “Bar Check”
Per le indagini ad alta risoluzione dei primi metri di sottofondo si utilizzano sistemi acustici a frequenza variabile fra 2 e 16 khz (“Sub Bottom Profiler” SBP). È noto che, ad una più alta frequenza del segnale, maggiore è la risoluzione, e minore la penetrazione nel terreno. La tecnologia “CHIRP” utilizza impulsi acustici modulati in frequenza (FM) generati digitalmente in trasduttori elettroacustici, con un ampio spettro di frequenze utilizzabili. L’elaborazione digitale in tempo reale (o in ”post-processing”) è in grado di ottenere buoni risultati sia come risoluzione che come penetrazione. Un altro sistema che viene utilizzato è l’”Uniboom”, dove l’impulso acustico è generato da due piastre metalliche che vengono fatte collidere violentemente.
I sistemi “Side Scan Sonar” (SSS) sono in grado di produrre immagini del fondale tramite l’emissione di impulsi generati da trasduttori elettroacustici allineati su angoli diversi, e l’analisi delle ampiezze degli echi di ritorno. Tali immagini sono utilissime per studi morfologici, permettendo risoluzioni anche molto elevate (dell’ordine del centimetro), con una copertura spaziale continua lungo tutta la fascia indagata. I sistemi moderni sono in grado di effettuare le necessarie correzioni geometriche ai dati rilevati, ottenendo immagini relativamente poco distorte. La memorizzazione dei dati, assieme ai dati di navigazione, permette elaborazioni successive, ad esempio la costruzione di mosaici solo SSS, oppure la combinazione di dati di batimetria e SSS.
I rilievi SBP e SSS lungo il Fiume Po sono stati effettuati con un sistema combinato, installato su un “pesce” trainato dalla nave. Lo strumento impiegato è stato il DATASONICS CHIRP SYSTEM SIS-1000 (Fig. 3.4.4a e 3.4.4b).
Fig. 3.4.4a - Sistema “Side Scan Sonar/Sub Bottom Profiler” combinati
Il sistema SSS, che opera nella banda compresa tra 90 kHz e 110 kHz, utilizza trasduttori in linea compensati per la pressione che producono un fascio di 0.5° in orizzontale e 60° in verticale, e opera in modalità “Chirp” con una elaborazione digitale del segnale che riduce marcatamente i lobi laterali di energia nel “pattern” di radiazione.
Quattro trasduttori installati all’interno del “pesce” provvedono alla emissione dei segnali “Chirp” SBP, operanti a frequenze fra 2 e 7 khz.
Durante il rilievo batimorfologico lo strumento ha lavorato secondo le seguenti modalità:
- range: 90 m ¸ 187.5 m
- repetition rate: 1/8 sec ¸ 1/4 sec.
- campionamento: 1024 ¸ 2048 samples/ping
L’operatore ha agito sui guadagni dei canali destro e sinistro del SSS e del canale del SBP in funzione dei cambi litologici presenti nei tratti indagati.
I guadagni applicati vanno da 0 db a 6 db per il SSS e da -3 db a 3 db per il SBP.
Al variare dell’applicazione di tali guadagni è stato applicato un diverso “tvg” (time varying gain).

Fig. 3.4.4b - Generatore del segnale per rilievo SSS&SBP tecnologia “CHIRP”
Il sistema DATASONICS CHIRP SIS-1000 è composto da:
- trasduttore trainato DATASONICS TTV-190;
- sistema di registrazione digitale DATASONICS SIP-100 “workstation
integrata;
- “drive” magneto-ottico;
- EPC 9802;
- 75 m di cavo “kevlar”.
Nella figura 3.4.1c è riportata la posizione del trasduttore in relazione al punto antenna GPS.
Il “software” TRITON installato sulla “console” del SIP-100 ha acquisito i dati su cartucce magneto-ottiche, con un controllo di qualità in tempo reale sul monitor e sul registratore grafico EPC. I dati sono stati processati in seguito con lo stesso “software” per la produzione delle immagini finali da interpretare.
Allo scopo di completare l’indagine sull’assetto degli orizzonti sismici, approfondire l’inquadramento della stratigrafia ed effettuare confronti con i risultati ottenuti dal rilievo “Chirp”, si è effettuato un rilievo a mezzo “Uniboom”.
Il sistema ha operato con energia di 175 J scaricata sulla piastra “Uniboom” montata su di un catamarano trainato. Gli echi riflessi sono ricevuti da un cavo a dieci idrofoni, distanziati di 1 m, trainato a lato del catamarano (Fig. 3.4.5a). Il cavo (primo idrofono) è stato mantenuto ad una distanza uguale a quella del catamarano.

Fig. 3.4.5a - Strumentazione “Uniboom”
Il sistema è interfacciato con un PC su cui il “software” Elics Delph2 gestisce l’intervallo di sparo, filtra e registra i dati provenienti dagli idrofoni ed associa ad essi la posizione proveniente dal sistema di navigazione (Fig. 3.4.5b).
Il sistema “Uniboom” è composto da:
- Geopulse 5420A “power supply”
- Piastra “Boomer” su catamarano
- Cavo idrofonico MDS a 10 idrofoni
- “Software” Elics Delph2 su PC
Nella figura 3.4.1c sono riportate le posizioni del catamarano e del cavo idrofonico in relazione al punto antenna GPS
La restituzione grafica dei dati batimetrici e morfologici (Voll. 2, 3) è stata eseguita mediante il “software” AutoCAD (R14).
Sulle carte batimorfologiche, inoltre, sono stati digitalizzati, mediante AutoCAD (R14), tutti gli elementi ritenuti più utili all’inquadramento del tratto di fiume indagato: argini, principali affluenti e canali, opere di difesa, ponti e principali centri abitati o località disposti lungo il tracciato esaminato.
Questi elementi cartografici provengono dal rilievo aerofotogrammetrico del 1988 che ha permesso la realizzazione della base cartografica ufficiale dell’Ufficio Speciale del Genio Civile per il Po di Parma, “Carte del Fiume Po” in scala 1:10000, fornita da ARNI (Azienda Regionale per la Navigazione Interna).
L’acquisizione della cartografia di base è stata effettuata tramite tavolo digitalizzatore calibrando la mappa da digitalizzare su più punti di riferimento espressi sulle carte “sorgenti” in coordinate Gauss-Boaga. Questa procedura, per quanto eseguita con accuratezza, comporta l’introduzione di alcuni errori legati sia alla qualità del dato cartografico originale, intesa come livello di precisione di punti e grado di densità delle informazioni, sia ad imprecisioni nella digitalizzazione dovuti allo strumento ed all’operatore.
Gli errori di graficismo insiti nelle mappe “sorgenti” sono mantenuti nelle operazioni di digitalizzazione e sono tanto più evidenti quanto diverse sono le scale di partenza e di rappresentazione finale del prodotto cartografico (nel nostro caso la scala di partenza era 1:10000, mentre quella finale è stata 1:5000 e 1:1000 - vedi Voll. 2, 3).
È da sottolineare, inoltre, che la cartografia disponibile, risalendo a rilievi aerofotogrammetrici del 1988, ha potuto rappresentare solo un parziale riferimento rispetto ai dati acquisiti durante il rilievo nel 1996; ciò ha fatto riscontrare, in molti casi, una variazione evidente del corso del fiume e delle opere ad esso legate quali posizione degli argini, delle difese, apertura o chiusure di canali.
Fig. 3.4.5b - Schema di interfacciamento dei sistemi di posizionamento, acquisizione e “processing” utilizzati per il rilievo batimorfologico a bordo della S/V “M. Adelaide”
La elaborazione dei dati batimetrici prodotti dal sistema Interferometrico ha avuto come obiettivi:
la corretta edizione e georeferenziazione dei dati (coordinate E(x), N(y), z, tempo), e la riduzione in numero degli stessi per una migliore e più agile utilizzazione (mediamente un punto ogni 0.25 m nello spazio EN),
il riporto del datum batimetrico al livello medio mare, e la generazione di dati mediati ogni 1 m con tutte le linee acquisite, all’interno dello spazio stabilito per le carte finali (Tav. 3.2),
la generazione di modelli digitali del terreno (DTM) riferiti al livello medio mare e al pelo dell’acqua del fiume,
la produzione delle mappe finali 1:5000,
la migliore utilizzazione futura dei dati.
Come ricordato nel paragrafo 2.3.1, il sistema di posizionamento ha fornito le coordinate nel Datum M.Mario 1940, fuso Ovest. Esse sono state memorizzate come coordinate cartesiane x (Est, E) e y (Nord, N). A tali coordinate sono stati applicati gli offsets strumentali e distribuite ai vari sistemi di acquisizione. Per quanto riguarda il sistema interferometrico ‘multibeam’ si ottengono quindi punti georeferenziati nel sistema E, N, z (profondità) dal livello dell’acqua. Ad ognuno di questi punti è associata la coordinata temporale (espressa come ora legale, +2 rispetto a GMT). I dati telerilevati degli idrometri del Magistrato del Po sono in un sistema di coordinate cartesiane x (ora solare italiana, +1 rispetto a GMT) e y (altezza del livello dell’acqua, riportata ad altezza sul medio mare, con somma eventuale dello zero idrometrico). I dati degli Idrometri a lettura diretta sono in ora legale, e sono stati riportati ad ora solare. In fig 3.5.1a è riportata una schematizzazione dei dati disponibili e dei vari sistemi di riferimento.
Fig. 3.5.1a - Schematizzazione dei dati disponibili e dei vari sistemi di riferimento utilizzati nell’elaborazione. (a) Il fiume nello spazio tridimensionale, e idrometri telerilevati (pallini rossi). (b) tratto del fiume nello spazio tridimensionale e matrice delle distanze lungo l’asta rettificata X(E,N). (c) letture degli idrometri nel periodo di indagine. (d) livelli dell’acqua (rosso) e livello di magra (blu), in relazione al periodo di indagine e alle distanze lungo l’asta rettificata.
GEOREFERENZIAZIONE, EDIZIONE E FILTRAGGIO
Il modulo ‘swath genarator’ del pacchetto ISIS100 SUBMETRIX è stato utilizzato per convertire i dati di angoli, tempi e posizione in un file contenente posizione, profondità, tempo, per ogni punto sul terreno su cui erano disponibili misure all’interno della strisciata. Opportuni filtri hanno eliminato in parte artefatti dovuti ad errori di posizionamento o di scandaglio (falsi echi, etc.).
Un modulo SUBMETRIX modificato IGM è stato utilizzato per estrarre da ogni file punti con coordinate E, N, z, tempo mediati con tecnica ‘block-mean’ (Wessel e Smith, 1996) ogni 0.25 m (ricordiamo che ogni strisciata strumentale produce circa 10000 punti campionati sul terreno al secondo, con risoluzione spaziale di pochi cm, per cui il numero degli stessi per ogni linea diventa enorme e ingestibile).
RIPORTO DEL DATUM BATIMETRICO AL LIVELLO MEDIO MARE
Come si è visto nel §1.4 il dato di profondità misurato nell’alveo fluviale risente delle variazioni nel tempo e nello spazio dell’altezza del livello dell’acqua, a causa della marea (verso la foce) e per l’innalzamento dell’alveo (verso monte).
Il procedimento di edizione e riporto al livello di riferimento (medio mare) è consistito principalmente nelle seguenti fasi:
valutazione e elaborazione dei dati idrometrici disponibili,
creazione della matrice bidimensionale per la correzione di livello in funzione del tempo e della distanza,
applicazione della correzione di livello ai dati filtrati 0.25m,
Sono stati raccolti tutti i dati disponibili degli idrometri telerilevati e a lettura diretta dalla foce ad Ostiglia (Fig.3.5.1b) durante il periodo di lavoro. I dati sono stati forniti dal Magistrato del Po e dai suoi Uffici Periferici. Purtroppo non sempre è stato possibile avere i dati continui degli idrometri telerilevati, a causa di malfunzionamenti di Castelmassa e Pontelagoscuro. Per ottenere tale continuità, indispensabile per la corretta parametrizzazione della funzione di riporto, si sono quindi utilizzate anche tutte le misure disponibili degli idrometri a lettura diretta. I tre idrometri telerilevati di Pila, Cavanella e Polesella hanno fornito dati continui e di buona qualità.
Fig. 3.1.5b - Rappresentazione della superficie del livello dell’acqua durante il rilievo batimetrico (colore blu), interpolata da 2a e 2b, con i dati degli idrometri telerilevati di Pila, Cavanella, Polesella, Pontelagoscuro, Castelmassa (Magistrato del Po a Parma). Sono stati inoltre usati idrometri sintetici a Revere e Borgoforte (sfasando temporalmente e spazialmente la curva di Castelmassa), e a 20km a mare (tramite software di previsione maree. Viene anche presentata (in grigio) la superficie di magra calcolata con la polinomiale di Fig. 1.4d. Inizio registrazione 21-set-1996 ore 00:00:00 solari.
Per garantire stabilita’ alla interpolazione polinomiale, che per definizione passa per i punti di controllo, è stato generato un idrometro sintetico in mare, al largo della foce (ad una distanza di 20 km dall’idrometro di Pila), utilizzando un algoritmo di previsione altezza di marea, con le costanti armoniche di Ravenna e Venezia. A monte, in mancanza di dati, è stato creato l’idrometro virtuale di Roncocorrente, utilizzando la pendenza media del fiume nel tratto Pontelagoscuro - Roncocorrente (Tab 1.4d) e la curva idrometrica di Castelmassa sfasata temporalmente.
In generale, sarebbe utile avere i dati telerilevati da tutti gli idrometri, in maniera da coprire spazialmente e temporalmente tutto il rilievo. Inoltre, anche i dati degli idrometri manuali si possono rilevare di estrema importanza, nel caso di mancanza di dati dai telerilevati. È ovvio che in questo caso, va prestata la massima attenzione alla calibrazione reciproca degli zeri, ed alla dislocazione spaziale (che può introdurre diversi cm di errore, specialmente nella parte a monte).
Per ciascuno degli idrometri le letture sono state utilizzate per ricavare la funzione continua nel tempo tramite sviluppo in serie di Fourier, secondo le seguenti formule (Davis, 1986, Cap.4):
 (1a)
(1a)
dove
![]() ,
,
![]() (1b)
(1b)
dove Ak è
l ampiezza della k-esima armonica,
![]() la
fase, N il numero totale di osservazioni equispaziate (ogni ora), e
Hj la altezza del livello dell’acqua alla j-esima
osservazione.
la
fase, N il numero totale di osservazioni equispaziate (ogni ora), e
Hj la altezza del livello dell’acqua alla j-esima
osservazione.
In questo modo vengono calcolati i coefficienti armonici per lo sviluppo in serie di Fourier, che sono scritti in un file per le elaborazioni successive. Mantenendo 36 armoniche, gli errori fra i dati originali e quelli ricalcolati sono risultati dell’ordine di qualche centimetro, con ogni probabilità causati da rumore strumentale.
Utilizzando questa funzione e applicando gli opportuni sfasamenti temporali e spaziali, la curva di Polesella è stata posizionata in coincidenza delle curve idrometriche manuali di Pontelagoscuro, Castelmassa e Revere. Mentre le curve di Castelmassa e Revere si sovrappongono quasi perfettamente, sull’idrometro di Pontelagoscuro permane una ambiguità, come testimoniato dallo scarso grado di coincidenza fra le curve.
La correzione di livello s.l.m. ai dati di batimetria contenenti le coordinate x, y, z e il tempo di acquisizione (ora solare italiana, in accordo con le registrazioni degli idrometri telerilevati), è stata calcolata tramite uno sviluppo polinomiale funzione della distanza (misurata lungo l’asse del fiume da un punto origine, tab 1.4e) tramite il metodo di interpolazione alle differenze divise di Newton (Korn e Korn, 1968, p.747), e del tempo, mediante lo sviluppo in serie di Fourier con i coefficienti calcolati da (1a) e (1b).
La relazione che lega la altezza s.l.m. al tempo t e alla distanza x è:
 (2a)
(2a)
dove
![]() (2b)
(2b)
e dove
I = numero idrometri
xi = distanza dal i-esimo idrometro
Li = altezza sul livello del mare dello zero idrometrico relativo al i-esimo idrometro
Mi = numero armoniche relative al i-esimo idrometro
Aik = ampiezza della k-esima armonica al i-esimo idrometro
wik = frequenza angolare della k-esima armonica del i-esimo idrometro
t0i = tempo inizio osservazioni al i-esimo idrometro
Fik = fase della k-esima armonica al i-esimo idrometro.
Per la applicazione delle correzioni s.l.m. (2a,2b), è stata attribuita ad ogni punto (E, N, z, t) la coordinata spaziale x della distanza rettificata lungo l’asta fluviale. Il punto diventa quindi di coordinate (x, z, t). Per velocizzare la applicazione dell’algoritmo, la superficie dell’alveo è stata divisa in celle di 100 m, ai cui punti centrali sono state attribuite le distanza dal punto origine (Fig. 3.1.5c). La suddivisione in celle dell’alveo è stata fatta utilizzando una linea mediana lungo il fiume (digitalizzata centralmente al rilievo batimetrico, ed interpolata linearmente ogni 50 m), espansa lateralmente a destra e sinistra per circa 2 km a passo di 50 m.
Per ogni punto di coordinate (E, N, z, t) è stata calcolata la appartenenza ad una cella, e applicata la correzione s.l.m. (x, z, t) con x la distanza del centro cella dal punto origine, creando quindi una matrice:
![]()
![]()
dove
xj,j=distanza della cella di indici i=( Nk - Nmin)/100, j=( Ek - Emin)/100, con k l’indice del k-esimo punto del vettore delle distanze lungo l’asta rettificata.
I dati di uscita dalla procedura sono stati organizzati in un file mediato con la tecnica ‘block-mean’ ogni m nello spazio EN, contenente i dati (E,N,Z) di tutte le linee appartenenti ad ogni singolo foglio 1:5000.
Fig. 3.1.5c - Rappresentazione spaziale della matrice delle distanze dalla origine a Pila. A partire dalla mediana del fiume, sono state create celle di 100m per una copertura fino a circa 2km dal centro fiume. Con un semplice algoritmo, è possibile generare gli indici di tale matrice a partire dalla coordinate E,N di ogni punto all’interno dell’alveo. In questo modo viene creata la relazione con E,N con le distanze dalla origine a Pila.
ANALISI DEGLI ERRORI
La sorgenti possibili di errore sono:
Errori nel posizionamento E, N. Ciò si verifica soprattutto nei casi di mancanza di copertura DGPS. La soluzione è stata per il momento di eliminare i dati non corretti.
Errori nella misura interferometrica (errori di calibrazione, velocità del suono in acqua, rapporto segnale/rumore). La soluzione è stata di eliminare i dati che non soddisfacevano a condizioni di soglia medie. Gli errori presumibili relativi ai dati cosi’ filtrati possono essere dell’ordine di 10 cm. In mancanza di dati di controllo laterale, è stato impossibile effettuare una analisi del comportamento dell’interferometro sulle scarpate ad angolo molto alto, come ad esempio gli argini.
Errori nel calcolo del riporto a medio mare, dovuti principalmente al numero esiguo di idrometri telerilevati disponibili lungo l’asta con misure sinottiche. In via ipotetica è possibile il caso in cui una onda di piena non venga campionata correttamente nello spazio e nel tempo, cioè quando il suo quarto di lunghezza d’onda sia inferiore alla distanza fra due idrometri. Ciò si potrebbe verificare nei casi di piene impulsive, o, nel caso di salite molto rapide al culmine (vedi ad esempio la Fig. 1.4c) . Nel periodo in cui è stato fatto il rilievo, il livello dell’acqua è stato campionato in misura sufficiente, e ciò conduce a errori possibili di circa 10 cm. Non è invece stata possibile una analisi delle variazioni di livello del fiume nelle anse, a causa della forza centrifuga. Tali variazioni possono essere dell’ordine anche di 20-30 cm.
Errori nel calcolo della curva di minima magra per la costruzione delle carte batimetriche. Nella vicinanza della foce possono ipotizzarsi errori di circa 10 cm.
MODELLI DIGITALI DEL TERRENO
I dati di cui sopra sono stati utilizzati dal software IRAP (modulo GeoSea) per la produzione delle griglie regolari a passo 3m. s.l.m. per ogni carta 1:5000. In Tab.3.5.1a sono riportati i limiti delle griglie generate per ogni singolo foglio, La scelta del passo 3m è dettata da limitazioni intrinseche dovute alle dimensioni delle carte. La scelta dei parametri di elaborazione è stata mantenuta più o meno costante per tutte le griglie generate.
|
Foglio 1:5000 |
Est minima |
Nord minima |
Est massima |
Nord massima |
Denominazione |
|
1 |
1777107 |
4983638 |
1781107 |
4987638 |
Delta del Po |
|
2 |
1769857 |
4981533 |
1777357 |
4985533 |
Pila |
|
3 |
1764340 |
4981155 |
1770107 |
4985155 |
Ca’Zuliani |
|
4 |
1758303 |
4981155 |
1764590 |
4985155 |
Porto Tolle |
|
5 |
1755480 |
4983068 |
1758553 |
4987068 |
Veniera |
|
6 |
1751708 |
4986818 |
1756689 |
4990818 |
Contarina |
|
7 |
1744458 |
4987687 |
1751958 |
4991687 |
Cavanella Po |
|
8 |
1741423 |
4984199 |
1745423 |
4990982 |
Corbola |
|
9 |
1735704 |
4982878 |
1741673 |
4986878 |
Serravalle |
|
10 |
1730513 |
4982878 |
1735954 |
4986878 |
Berra |
|
11 |
1723263 |
4982189 |
1730763 |
4986189 |
Crespino |
|
12 |
1716013 |
4981307 |
1723513 |
4985307 |
Polesella |
|
13 |
1713947 |
4977557 |
1717670 |
4981557 |
Garofolo |
|
14 |
1707356 |
4974996 |
1714197 |
4978996 |
Francolino |
|
15 |
1703276 |
4972858 |
1709338 |
4976858 |
Pontelagoscuro |
|
16 |
1697290 |
4976608 |
1704790 |
4980608 |
Stienta |
|
17 |
1690040 |
4976608 |
1697540 |
4980608 |
Stellata |
|
18 |
1686840 |
4980358 |
1692713 |
4984358 |
Ficarolo |
|
19 |
1680725 |
4982228 |
1687090 |
4986228 |
Felonica |
|
20 |
1677710 |
4985978 |
1683204 |
4989978 |
Castelmassa |
|
21 |
1671684 |
4989032 |
1679184 |
4993032 |
Bergantino |
|
22 |
1665994 |
4989639 |
1671934 |
4993639 |
Ostiglia |
Tab. 3.5.1a - Coordinate minime e massime dei singoli fogli 1:5000.
Tuttavia, si presume che un utilizzo più spinto come risoluzione possa arrivare anche a griglie regolari a passo 2m e 1m. Da tali griglie si sono generate griglie NETCDF GMT, da cui si sono estratte le linee di isovalore ogni 0.5 m in un formato DXF. Tali linee sono state importate quindi in AUTOCAD per editing (‘splinè a 3 punti) e quotatura automatizzata.
La produzione delle carte batimetriche, con i dati riferiti al pelo libero dell’acqua, lungo tutta l’asta fluviale, ha richiesto la creazione di una superficie di riferimento con il livello al minimo di magra statistica. Utilizzando la funzione polinomiale di Fig.1.4d, una funzione in grado di calcolare la distanza lungo l’asta rettificata in base alle coordinate E,N, e alcuni programmi GMT (grd2xyz,xyz2grd) si sono generate, a partire dalle griglie NETCDF GMT s.l.m. le griglie riferite al livello dell’acqua. Come sopra, è possibile, quindi, estrarre le linee di isovalore ed importarle in AUTOCAD per la edizione e la stampa. Dalle griglie è possibile creare sezioni trasversali, calcolare volumi, etc. etc.
Gli errori macroscopici, ad esempio quelli dovuti al posizionamento, con linee che si sovrapponevano agli argini, oppure quelli dovuti agli errori dell’interferometro su scarpate ripidissime, sono stati eliminati nella fase di edizione in AUTOCAD. Saranno comunque disponibili a corredo mappe con le zone di errore. In ogni caso, una volta confermata la validita’ dell’algoritmo di riporto a medio mare e di riporto al livello dell’acqua (batimetrie), è possibile agire sulle griglie con gli opportuni operatori matematici. Ad esempio, dati di batimetria positivi sono da considerare sospetti. Le aree cosi’ identificate possono essere utilizzate per filtrare i dati s.l.m.
UTILIZZO DEI DATI
I dati sono stati organizzati in maniera da poter ripercorrere tutta la catena di elaborazione, a partire dai dati prodotti dal modulo ‘swath-generator’ di ISIS. Il software prodotto è in C e FORTRAN, compilabile in ogni architettura hardware e software. I dati dei DTM sono nella forma binaria IRAP (organizzazione ‘big-endian’) e GMT (organizzazione ‘network-independent’ netcdf), e sono accessibili con moduli ad-hoc. Gli stessi sono disponibili nel formato ASCII XYZ, oppure griglie IRAP. I dati delle mappe 1:5000 sono nel formato DXF. Le linee isovalore s.l.m. e al livello acqua sono in ASCII oppure in DXF.
Fig. 3.5.1d - Diagramma di flusso delle operazioni di “processing” dei dati batimetrici.
I risultati dell’indagine batimetrica che ricoprono il tratto fluviale compreso tra la foce e Ostiglia sono stati riportati sulle carte in scala 1:5000 presenti nei volumi 2 e 3. Le quote delle isobate, espresse in metri, si riferiscono al livello medio mare comprendendo quindi valori sia positivi che negativi.
In TAV. 3.5.1.1a è riportato il profilo longitudinale del fondo lungo l’asta fluviale rettificata. I dati riportati sono le profondità minime e massime rilevate sulla verticale della nave, ottenute campionando i DTM con i dati di navigazione UKOOA nei tratti ascendente e discendente del rilievo, e ordinando i risultati per distanze da Pila secondo la procedura di Fig. 3.5.1.c (sono mostrati anche i valori dell’ecoscandaglio, riportati s.l.m. con la misura dell’altezza dell’acqua all’acquisizione, che si mostrano in discreto accordo con i dati ‘multibeam’). E’ riportata inoltre la curva di magra del fiume di Fig. 1.4d. A scopo di confronto sono riportati anche i profili del fondo e dell’acqua Q335 di ARNI e CAIRE (1992). Risultano evidenti la molto maggiore densità e continuità di dati del presente rilievo e la discordanza fra le misure del profilo dell’acqua.
Tav. 3.5.1.1a Profilo longitudinale S.L.M. lungo l'asse navigabile.
Dall’esame del profilo longitudinale si evidenziano la grande variabilità morfologica del fondale, e la presenza di profondi infossamenti, soprattutto nelle concavità dei meandri. Particolarmente notevoli quelli di Bergantino, Ficarolo, Pontelagoscuro, Polesella (dove è raggiunta la massima profondità di -23 s.l.m.), Cavanella, Taglio di Po. Alla defluenza del Po di Gnocca, a Porto Tolle, sono presenti profonde canalizzazioni alla biforcazione dei due rami (Fig. 3.5.1.1a).
Procedendo dall’area di foce il fronte del delta inizia, lungo il corridoio indagato dal rilievo, circa 800 m al largo della Busa Dritta. In quest’area spostandosi verso mare si assiste alla variazione del gradiente che da molto debole passa ad un valore medio di circa 1.8% nella zona terminale dell’area indagata che corrisponde infatti al tratto iniziale del pendio del fronte deltizio.
Fig. 3.5.1.1a Canalizzazioni profonde alla biforcazione dei due rami del Po di Venezia e di Gnocca.
Nel tratto compreso tra il faro di Punta Maistra e la Busa Dritta il fondale ha un gradiente basso, inferiore allo 0.1%, e una profondità che varia tra -3 e -5 m. In quest’area di foce si assiste ad un forte rallentamento della corrente fluviale con conseguente perdita della capacità di trasporto che produce gradienti debolissimi e che risulta nel dominio dei processi di deposizione.
Continuando verso monte nel tratto corrispondente al Po della Pila e a valle della Busa di Scirocco, la profondità raggiunge i -9 m lungo la parte indagata della sponda destra; in questa zona la batimetria mostra anche un pendio dell’argine piuttosto ripido.
Il tratto in curva a valle di Ca’ Zuliani, dove il fiume corre lungo un tracciato artificiale che taglia il meandro, registra una profondità massima del letto pari a -11 m. La zona più profonda si estende parallelamente al corso d’acqua lungo il lato concavo dell’ansa che corrisponde alla zona in cui si concentra l’erosione della corrente. La sponda concava mostra quindi un notevole gradiente di pendio coincidente molto probabilmente con il pendio della difesa artificiale.
Un’altra area profonda che raggiunge i -12 m è situata poco a monte di Ca’ Zuliani, lungo la sponda sinistra, per un’estensione di circa 500 m lungo il corso d’acqua.
Sotto il ponte di Ca’ Venier si concentra una zona di erosione allungata parallelamente al corso d’acqua che raggiunge la profondità di -9 m.
Poco a monte di Ca’ Venier, di fronte all’abitato di Porto Tolle, la batimetria evidenzia un basso che supera il valore di -21 m per un’estensione di circa 250 m in lunghezza. Questa zona è situata nell’area antistante la defluenza del Po di Maistra.
A monte di Porto Tolle nell’area compresa tra l’isola fluviale e la sponda destra è presente una zona di forte erosione sul lato concavo dell’ansa che raggiunge i -16 m di profondità e mostra un ripido pendio di sponda.
A valle di Contarina un’altra zona di erosione localizzata è presente tra un’isola fluviale e la sponda sinistra dove il letto raggiunge i -16 m di quota.
Tra Taglio di Po e Contarina la profondità supera i -18 m in una piccola zona adiacente la sponda destra mentre lateralmente la profondità media è di circa -8 m. A monte di Cavanella è presente un’area in cui si sviluppano forme di fondo trattive tipo cordoni sabbiosi caratterizzata da quote maggiori della profondità che raggiunge i -5 m mentre a monte, nell’area centrale dell’asta fluviale, la profondità diminuisce fino a -3 m.
A valle di Cavanella esiste invece una zona d’erosione localizzata attorno al molo che mostra valori di profondità fino -19 m ma di scarsa estensione areale.
Nel meandro a monte di Corbola il lato concavo destro del fiume presenta una profondità massima di -12 m nella sua zona centrale, mentre il successivo meandro, compreso tra Corbola e Bottrighe, mostra una profondità inferiore.
Successivamente la quota del letto si mantiene ad un valore compreso tra -4 e -6 m mentre nell’area a fondo piano compresa tra Papozze e Serravalle la quota diminuisce fino a raggiungere -10 m in corrispondenza del centro di una zona depressa di circa 200 m di lunghezza.
Nell’ansa compresa tra Canalnuovo e Berra sul lato sinistro del fiume il letto presenta quote negative che aumentano di valore spostandosi dal centro del fiume verso la sponda sinistra individuando la zona di maggior erosione. Lo stesso si verifica nell’ansa di Guarda Veneta e Guarda Ferrarese dove la quota si abbassa fino a -13 m, sempre sul lato sinistro del letto.
Nell’ansa compresa tra Zocca e Polesella si registrano invece valori fino a -23 m sempre concentrati sul lato sinistro nel tratto di maggior curvatura.
Nel tratto fluviale delimitato da Pontelagoscuro, sulla sponda destra, e sulla sinistra da Santa Maria Maddalena, il fondo passa da valori di circa -3 m a -13 m, delimitando una zona depressa che si allunga per circa 800 m a monte del ponte che collega la località di Pontelagoscuro con Santa Maria Maddalena.
Sulla sponda destra del meandro a valle di Ficarolo, in prossimità della zona di confluenza del Torrente Panaro, il fondo presenta valori negativi fino a -13 m.
A monte di Ficarolo le quote del letto progressivamente diventano positive presentando un valore medio di 0 m sul livello medio mare.
Nell’ansa antistante l’Isola Bianchi il fondo presenta nuovamente valori negativi che raggiungono al massimo la quota -8 m, in prossimità della sponda destra, per poi ritornare a valori positivi sia a monte che a valle.
Valori negativi fino alla quota massima di -13 m sono presenti in corrispondenza del meandro di Bergantino, sulla sponda sinistra, in cui si concentra maggiormente l’erosione mentre a valle e a monte si osservano nuovamente valori positivi.
I dati batimetrici e sismici ad alta risoluzione acquisiti per il progetto hanno consentito di affrontare lo studio dei caratteri geomorfologici attuali dell’alveo del Po nella sua asta terminale compresa tra l’area deltizia e Ostiglia.
L’ambiente sedimentario del fiume Po nella sua asta terminale si sviluppa per circa 130 km nell’area della piana alluvionale padana con un gradiente longitudinale assai basso (circa 1 per mille) fino a raggiungere la piana costiera del delta. I sistemi deposizionali compresi nel tratto studiato sono quindi due: quello fluviale e quello deltizio. Il modello sedimentario utilizzabile per descrivere i sedimenti attuali dell’alveo fluviale, nel tratto studiato, è quello di sistemi a canali meandriformi (Fig. 3.5.2a). Questo modello è infatti caratterizzato da un canale fluviale singolo, più profondo di quelli intrecciati tipici delle aree montane o pedemontane, intagliato in sedimenti sabbioso-limosi in cui l’acqua riempie la parte più bassa del canale anche in regime di magra (Ricci Lucchi, 1980). È molto frequente che i fiumi seguano un tracciato a meandri nelle pianure alluvionali dato il tipo di substrato che è costituito prevalentemente da sedimenti incoerenti di varia granulometria e cernita. Un corso d’acqua può sviluppare meandri se la corrente è sempre confinata fra sponde resistenti e di quota sempre maggiore rispetto al livello di massima piena. La corrente, per forza centrifuga, erode prevalentemente le sponde concave e sedimenta a valle nelle barre di meandro. L’azione di scalzamento della sponda concava e la sedimentazione nelle barre di meandro costringe ogni ansa ad allargarsi e ad accentuarsi (Parea, 1988). La larghezza e la complessità delle anse dei meandri dipende dall’erodibilità e dalle caratteristiche geologiche delle sponde ed aumenta con la portata del fiume. Il canale meandriforme, fiancheggiato da argini naturali e barre di meandro, migra lateralmente entro una zona chiamata fascia di meandro larga da 15 a 20 volte il canale (Ricci Lucchi,1980). Gli alvei fluviali presentano sinuosità di ogni tipo, da lievissime deviazioni dall’andamento rettilineo ad anse molto marcate simili ad una sinusoide, fino ad anse accentuatissime e contorte (Parea, 1988). Uno dei parametri più usati per esprimere in modo quantitativo la forma di tali anse è la sinuosità definita da Leopold e Wolman (1960) come il rapporto fra la lunghezza della corda e quella dell’arco di ansa compresa fra due flessi successivi del tracciato del corso d’acqua. Per meandro si intende un’ansa con sinuosità maggiore od uguale a 1.5 (Leopold et al., 1964). In particolare si definisce botta la ripa concava con l’annessa sensibile depressione del fondo, (corrispondente al pool degli autori di lingua inglese) e soglia il bassofondo fra due botte consecutive (corrispondente all’inglese riffle) (Parea, 1988).
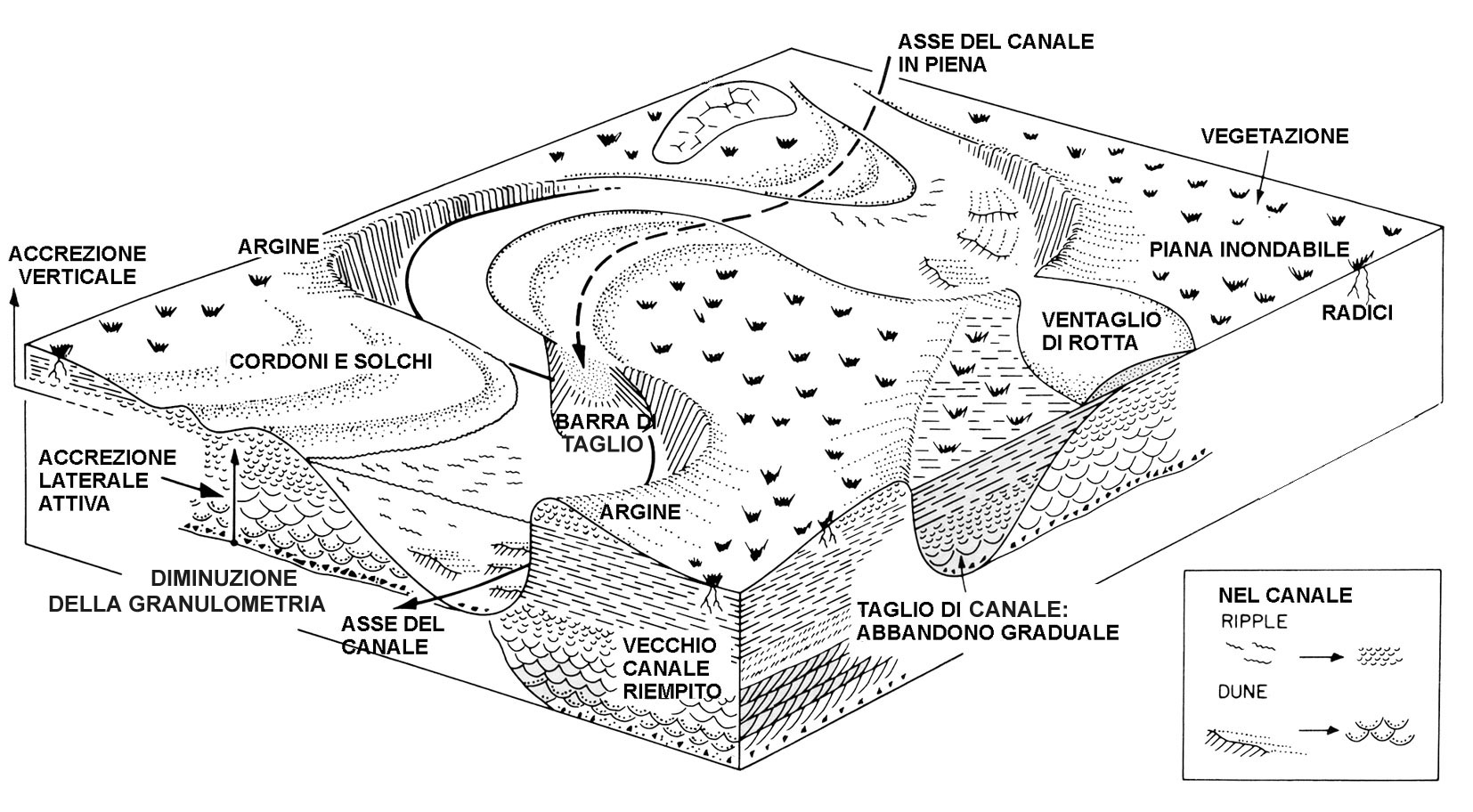
Fig. 3.5.2a - Rappresentazione tridimensionale degli elementi morfologici e stratigrafici di un sistema fluviale meandriforme (Walker e Cant, 1984)
Nel segmento di alveo indagato si sono individuati tre tipi principali di tratti (Tav. 3.5.2):
- rettilineo
- in curva
- a meandro
I tratti fluviali rettilinei sono quelli dominanti nell’asta indagata (53% del totale, Fig.3.5.2b), dovuti in parte all’esistenza di sponde rettilinee di argini artificiali; seguono poi i tratti in curva (36% del totale) caratterizzati da una sinuosità media di 1.1. I tratti di canale meandriforme, secondo la definizione di Leopold et al. (1964), sono cinque, occupano l’11% dell’asta totale, e sono localizzati nei seguenti punti:
|
MEANDRO |
INDICE DI SINUOSITÀ |
RAGGIO DI CURVATURA |
|
Ostiglia |
2.2 |
544 m |
|
Bergantino |
2.7 |
750 m |
|
Foce Torrente Panaro |
1.9 |
643 m |
|
Corbole |
1.5 |
1308 m |
|
Bottrighe |
1.5 |
1074 m |
Fig. 3.5.2b - Distribuzione dei tipi di tratto fluviale in tutta l’area indagata
Ogni tipo di tratto fluviale è caratterizzato da differenti morfologie del fondo e tipi di erosione riflettenti un diverso regime idraulico, una diversa sezione del canale e differenti rapporti tra carico in sospensione e carico di fondo.
Il materiale trasportato dal Po nel tratto indagato è costituito prevalentemente da sabbie e peliti. Tali sedimenti si organizzano in differenti forme di fondo a seconda della velocità della corrente, del gradiente del letto e del tipo di tratto fluviale. I differenti tipi di forme di fondo che si sviluppano nell’area indagata sono i seguenti:
fondo piano
a ripple
a megaripple
con dune
con cordoni sabbiosi
con barre fluviali sommerse
L’area studiata è stata suddivisa in due zone differenti: una compresa tra Ostiglia e Garofolo ed una a valle di Garofolo fino al delta. Queste due zone essendo caratterizzate da una differente velocità della corrente (maggiore nel primo caso e minore nel secondo) e da un differente gradiente (maggiore per la zona a monte e minore per quella terminale) mostrano ognuna una distribuzione caratteristica delle strutture sedimentarie di fondo (Tav. 3.5.2.1 e Figg. 3.5.2.1a, b, c).
|
|
|
|
|
|
Fig. 3.5.2.1b - Distribuzione delle morfologie fluviali in tutta l’area indagata e relazione di frequenza tra la morfologia e il tipo di tratto fluviale corrispondente
|
|
|
|
|
|
Fig. 3.5.2.1c - Distribuzione di frequenza delle morfologie fluviali nei tratti a monte e a valle di Garofolo
1 - Aree a fondo piano
Le aree a fondo piano occupano il 13% dell’area totale dell’asta indagata e corrispondono a tratti in cui si possono verificare le seguenti differenti condizioni idrodinamiche:
il valore della velocità della corrente rimane al di sotto della soglia limite per generare strutture trattive, per cui la superficie del letto rimane intatta e non avviene trasporto del materiale di fondo;
a parità di profondità il valore di velocità della corrente raggiunge il valore critico per cui il regime di flusso passa da subcritico a supercritico (ovvero quando il Numero di Froude è @ 1), generando un fondo piano (Bosellini et al., 1989), caratterizzato pero’ da trazione.
Sono state classificate come “aree a fondo piano” anche quelle in cui le eventuali forme di fondo non sono state risolte dagli strumenti. Aree a fondo piano occupano il 4% del totale nella zona a monte di Garofolo mentre a valle occupano il 22% dell’area totale e costituiscono il tipo dominante nel settore terminale di questa zona prima della foce. In generale la morfologia a fondo piano appare con la stessa frequenza media sia su tratti rettilinei che in curva, mentre essa è assai rara in tratti di meandro.
2 - Strutture trattive: ripple, megaripple, dune e cordoni
Per ripples, megaripples, dune e cordoni si intendono rilievi sedimentari di sabbia che si sviluppano all’interfaccia acqua-sedimento come risposta alla capacità di trazione sul fondo di una corrente e/o del moto ondoso. Queste forme di fondo, in funzione della velocità della corrente e della profondità del canale, si sviluppano a varia scala e con geometrie differenti (Fig. 3.5.2.1d). L’aumento della velocità della corrente e la diminuzione della profondità portano allo sviluppo di strutture trattive dapprima continue, con andamento da rettilineo a sinuoso, e poi discontinue, di tipo a barcana o linguoidi (Ricci Lucchi, 1980), (Fig. 3.5.2.1e). Il fattore discriminante della zona a monte di Garofolo da quella a valle è proprio la dominanza di forme di fondo discontinue nel primo caso e continue nel secondo che riflette la graduale diminuzione dei valori dei parametri idraulici della corrente da monte all’area di foce.
Fig. 3.5.2.1d - Rappresentazione tridimensionale delle forme di fondo (Bosellini, Mutti e Ricci Lucchi, 1989)
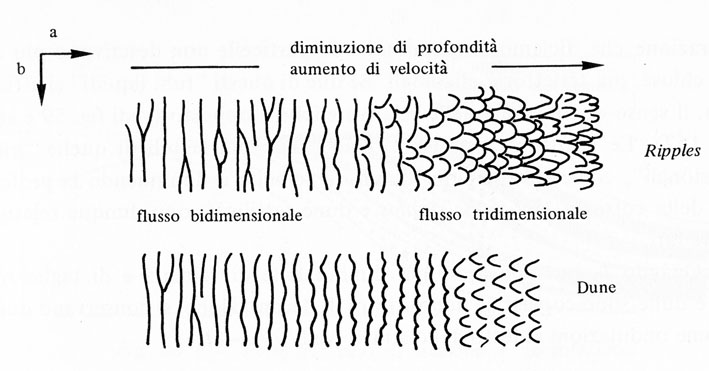
Fig. 3.5.2.1e - Variazione delle forme di fondo rispetto a velocità e profondità della corrente (da Ricci Lucchi, 1980)
Essendo la nomenclatura dei rilievi sedimentari eterogenea e confusa si sono distinte le varie forme a seconda dei parametri più evidenti che le distinguono e di quelli che meglio si è potuto misurare con le prospezioni sismo-acustiche, ovvero l’altezza, la lunghezza d’onda e l’andamento in pianta. Le strutture rilevate, essendo il risultato di forme da corrente fluviale, mostrano tutte un profilo asimmetrico e trasversale alla corrente con il lato sopracorrente poco inclinato perché spazzato dalla corrente e quello sottocorrente più ripido e corto soggetto solo alla gravità con inclinazione pari all’angolo di riposo del sedimento che mediamente è 35°-40° (Bosellini et al., 1989). Queste forme migrano sottocorrente seguendo un meccanismo di continua trazione: il sedimento viene prelevato dal lato posteriore della struttura e successivamente depositato sul lato frontale. Mentre l’altezza dei ripple è indipendente dall’altezza della lama d’acqua, quella delle dune non può superare 1/10 o 1/5 dell’altezza della lama d’acqua (Ricci Lucchi, 1980).
I diversi rilievi sedimentari del fondo sono stati così definiti:
|
tipo di rilievo |
altezza media |
lunghezza media |
lunghezza d’onda media |
geometria |
|
ripple |
< 0.2 m |
25-50 m |
3 m |
rettilinei/sinuosi/barcanoidi |
|
megaripple |
0.2 - 0.5 m |
25-50 m |
3.5 m |
sinuosi/barcanoidi |
|
dune |
0.5-1 m |
@ 50 m |
11 m |
sinuosi/barcanoidi |
|
cordoni |
³ 1 m |
@ 50 m |
25 m |
sinuosi |
Tab. 3.5.2.1 - Definizione delle forme di fondo
Nelle figure 3.5.2.1f e g sono mostrate le distribuzioni di frequenza dei tipi di forma di fondo e dei corrispondenti tipi di tratto fluviale in cui si sviluppano, sia a monte che a valle di Garofolo.
|
|
|
|
|
|
|
|
|
Fig. 3.5.2.1f - Distribuzione delle morfologie fluviali nel tratto a monte di Garofolo in funzione del tipo di tratto fluviale occupato
|
|
|
|
|
|
|
|
|
Fig. 3.5.2.1g - Distribuzione delle morfologie fluviali nel tratto a valle di Garofolo in funzione del tipo di tratto fluviale occupato
Un’area caratterizzata da forme di fondo a ripple presenta una dominanza di increspature di sabbia di altezza media inferiore a 0.2 m. Tale tipo di forme di fondo occupa il 32% dell’area totale indagata; piu’ in dettaglio, il 28% nella zona a monte, e il 35% a valle di Garofolo, dove diventa la forma dominante. Questa morfologia è presente soprattutto nei tratti rettilinei, e, secondariamente, nei tratti in curva, mentre la loro frequenza nei tratti a meandro è bassa (Tav. 3.5.2.1).
Un’area caratterizzata da forme di fondo a megaripple presenta un fondo con una dominanza di increspature di sabbia con altezza media compresa tra 0.2 e 0.5 m. Questo tipo di forme di fondo si estende per il 35% dell’area totale indagata rappresentandone la forma più diffusa. In dettaglio, essa costituisce sempre la forma dominante a monte di Garofolo occupando il 48% dell’area e diminuendo fino al 23% nella zona a valle. Le aree a megaripple, come quelle a ripple, appaiono distribuite con uguale frequenza sia nei tratti rettilinei che in quelli in curva (Tav. 3.5.2.1).
Un’area caratterizzata da dune presenta un fondo con dominanza di increspature di sabbia di altezza media compresa tra 0.5 e 1 m. Le dune costituiscono il terzo tipo di forma di fondo per diffusione nell’area indagata occupando il 19% del totale e mantenendo la stessa frequenza in entrambe le zone a monte e a valle di Garofolo. Le dune appaiono in generale per la maggior parte delle aree in tratti rettilinei, secondariamente in curva e solo in piccola parte nei tratti a meandro (Tav. 3.5.2.1).
Un’area caratterizzata da cordoni presenta un fondo con dominanza di increspature di sabbia con altezza media di circa 1 m. Sono state rilevate quattro aree principali con sviluppo di cordoni sabbiosi tre delle quali sono localizzate nella zona a monte di Garofolo dove la velocità della corrente è maggiore. I cordoni sabbiosi costituiscono la struttura sedimentaria più rara nel tratto indagato, occupando solo l’1% dell’area totale e presentandosi con la stessa frequenza su entrambe le zone sia a monte che a valle di Garofolo. Le aree con cordoni a monte di Garofolo appaiono per il 60% in tratti rettilinei per un’estensione totale di 1 km mentre a valle di Garofolo appaiono una volta soltanto in un tratto in curva per una lunghezza totale di circa 600 m (Tav. 3.5.2.1).
3 - Barre fluviali sommerse
Numerose barre sommerse si dislocano lungo l’area indagata, tutte con forma allungata e con asse principale parallelo alla direzione della corrente. In genere appaiono ricoperte al tetto da forme di fondo trattive come ripple o megaripple. La barra di dimensioni maggiori è localizzata in posizione adiacente all’argine destro a monte dell’abitato di Porto Tolle (Carta 4/22, Volume II) con lunghezza di quasi 600 m e larghezza media di circa 100 m. Questa barra mostra al tetto forme di tipo megaripple con andamento sinuoso.
Nelle pagine seguenti (Figg. 3.5.2.1h, i, l, m, n) vengono presentati alcuni esempi di registrazioni SSS e SBP relativi alle forme di fondo precedentemente descritte.
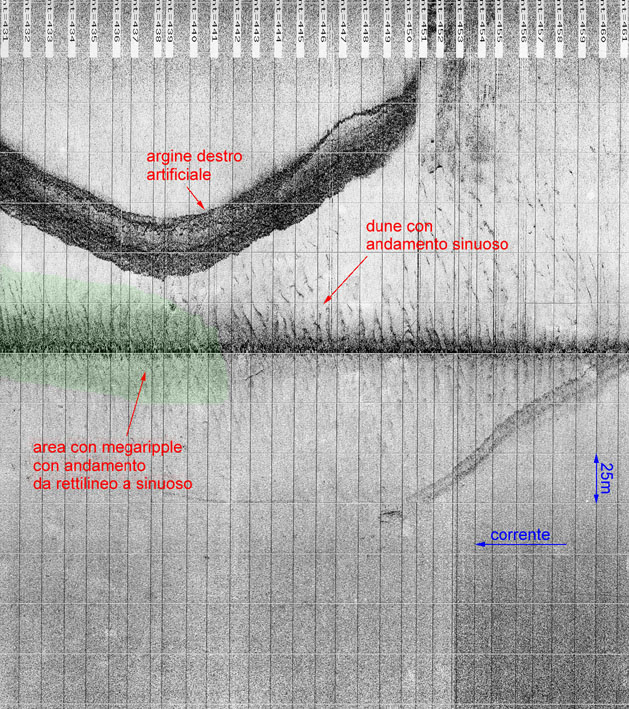
Fig. 3.5.2.1h - Esempio di registrazione “Side Scan Sonar” in un’area con forme di fondo continue a monte di Pila
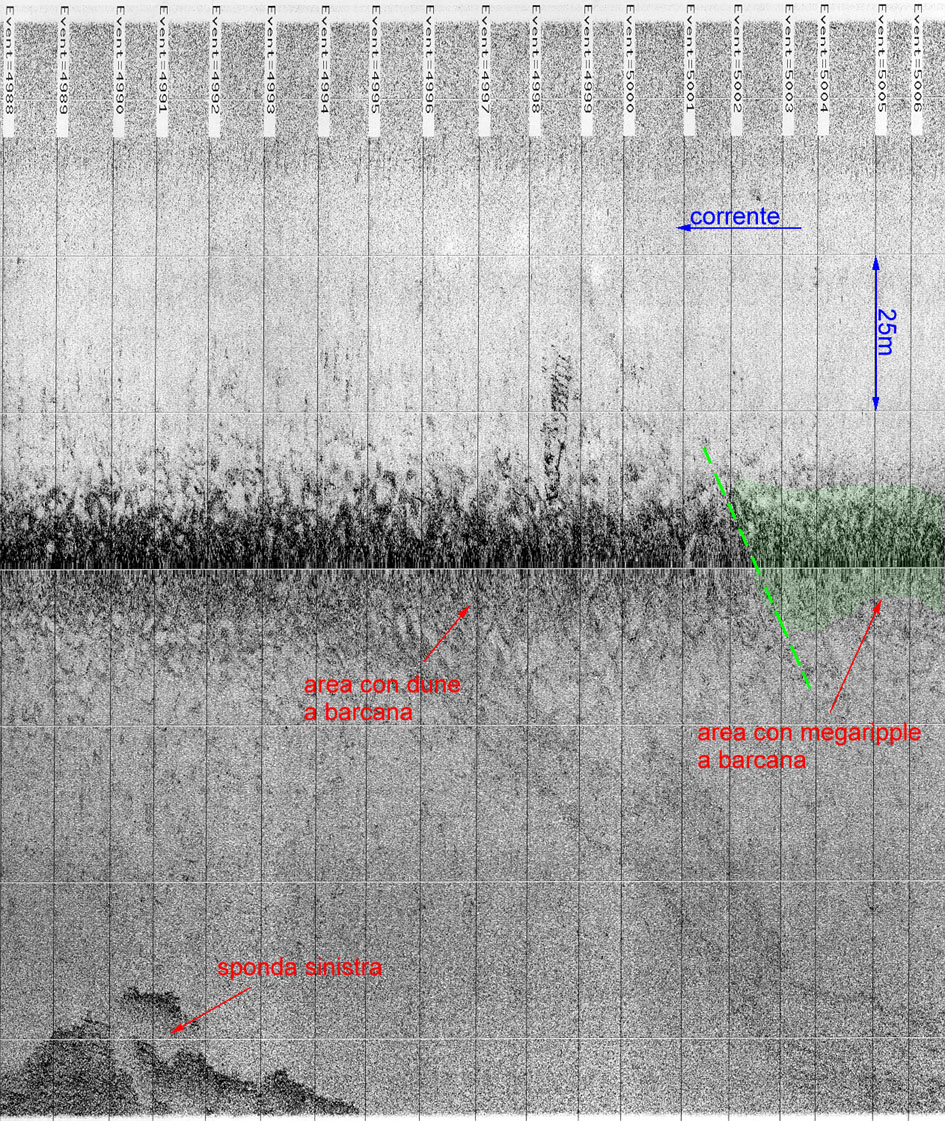
Fig. 3.5.2.1i - Esempio di registrazione “Side Scan Sonar” in area con dominanza di forme di fondo discontinue di tipo barcanoide a monte di Occhiobello
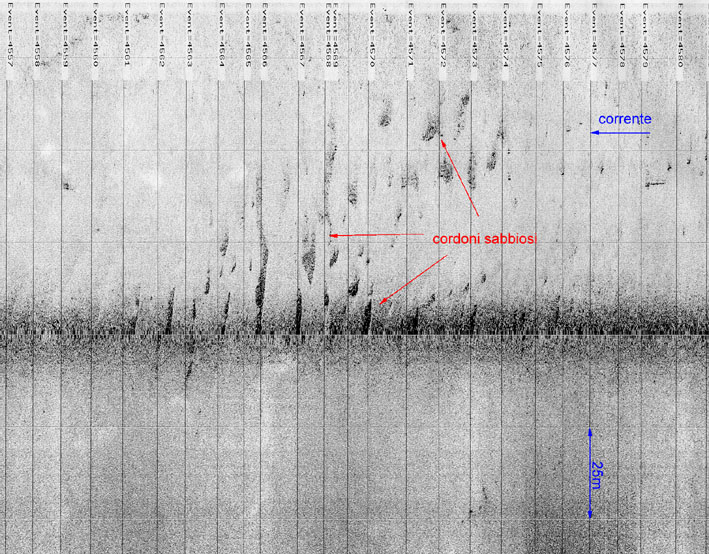
Fig. 3.5.2.1l - Esempio di registrazione “Side Scan Sonar” in un’area caratterizzata da cordoni sabbiosi a valle di Pontelagoscuro (si noti l’andamento leggermente sinuoso di tali strutture che raggiungono i 50 m di lunghezza)
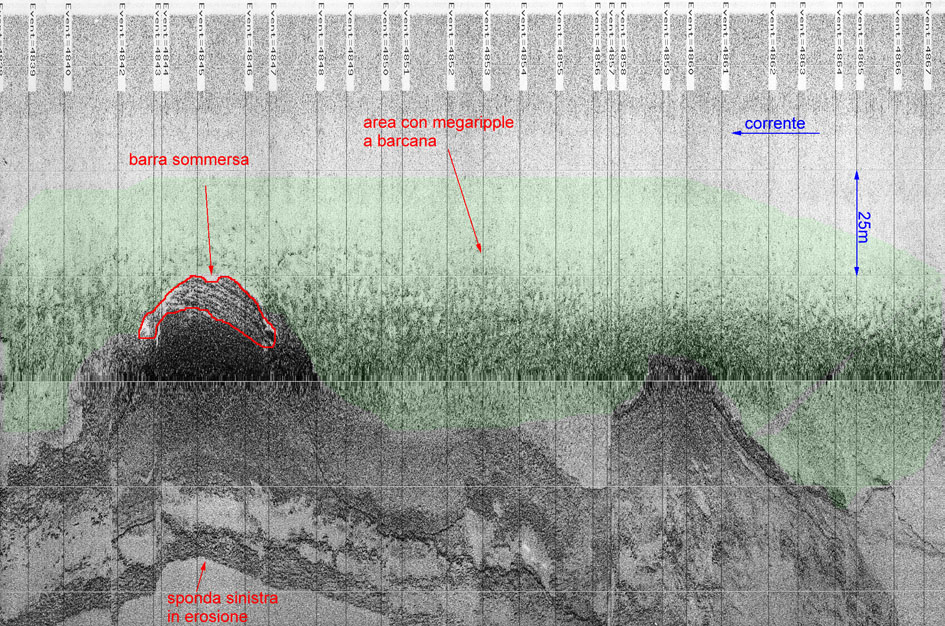
Fig. 3.5.2.1m - Esempio di registrazione “Side Scan Sonar” di una barra fluviale laterale sommersa a valle di Occhiobello. Tale struttura si è instaurata in un’area a dominanza di megaripple a barcana. Si noti la sponda sinistra del fiume fortemente erosa con nicchie di distacco diffuse
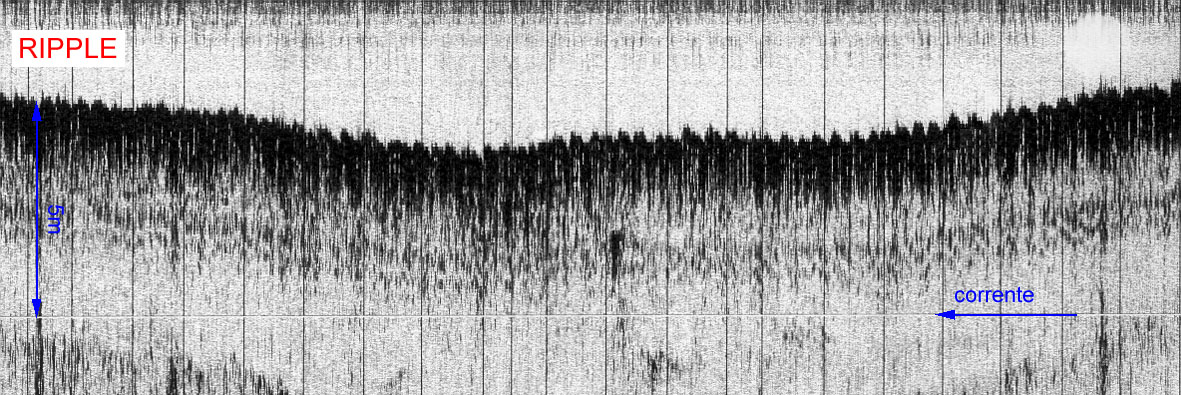
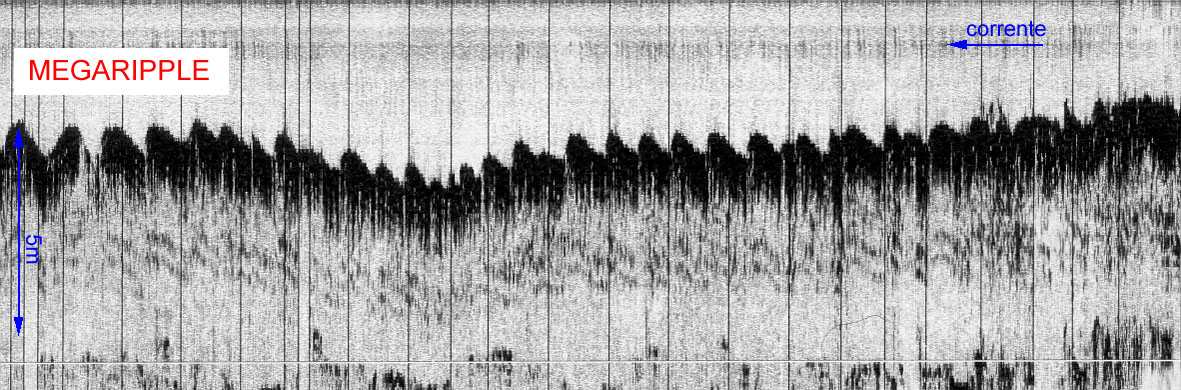
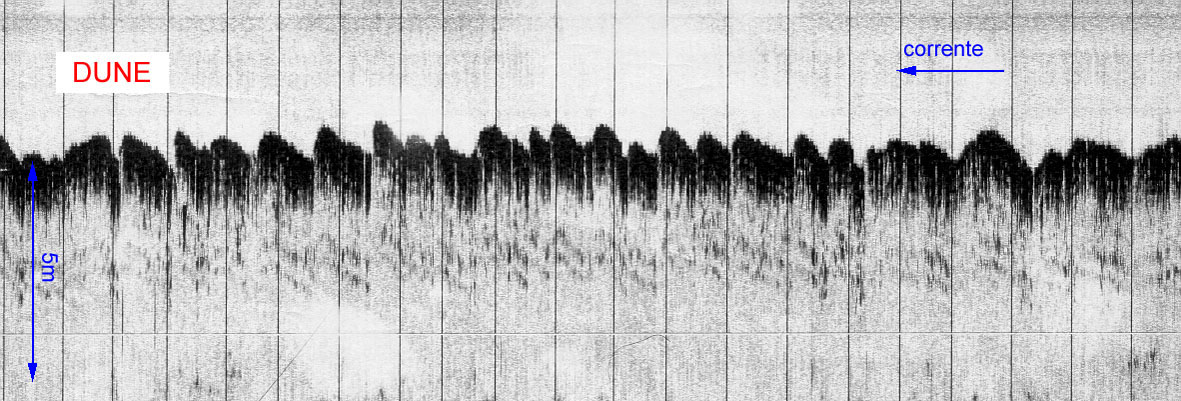
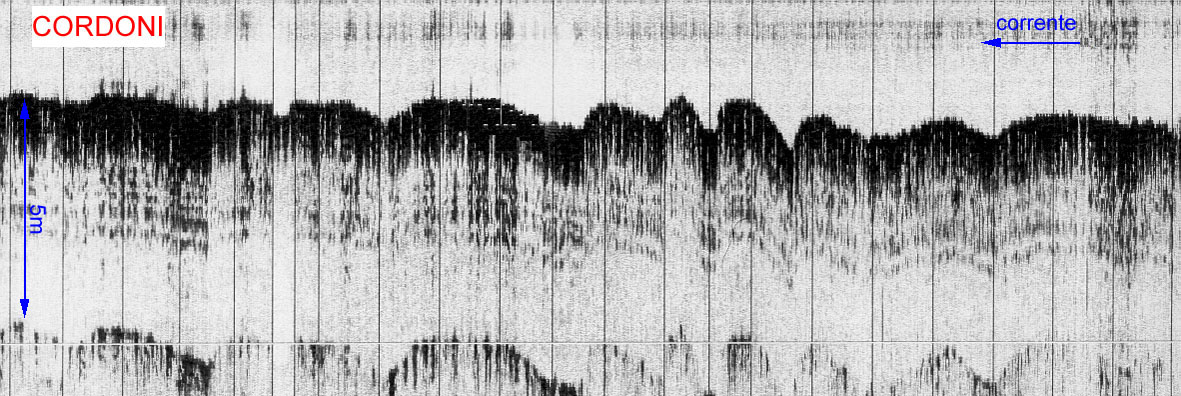
Fig. 3.5.2.1n - Esempi di registrazione Sub Bottom Profiler delle strutture trattive
Le forme di erosione rilevate nell’area indagata sono le seguenti:
- docce d’erosione vorticosa circolare
- argini in erosione con nicchie di distacco diffuse
Zone d’erosione localizzata generate da correnti vorticose appaiono come depressioni sub-circolari di circa 20-25 m di diametro. In particolare queste si trovano a valle di Garofolo con diffusione massima tra Cavanella di Po e Porto Tolle (Fig. 3.5.2.2a).
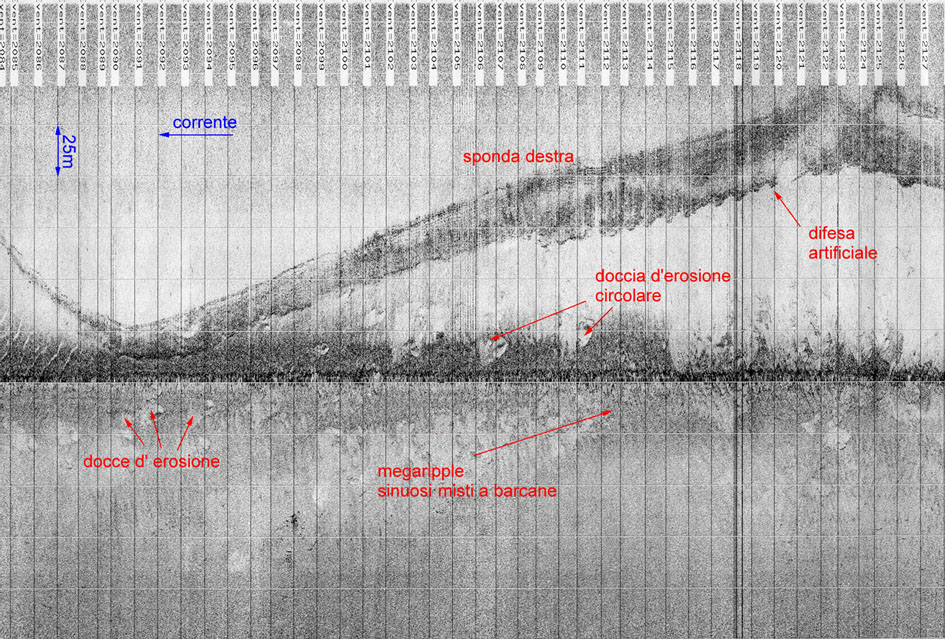
Fig. 3.5.2.2a - Esempio di registrazione “Side Scan Sonar” di un’area caratterizzata dalla presenza di numerose forme di erosione circolare nel tratto compreso tra Contarina e Taglio di Po. Tali strutture si sono instaurate in un’area a dominanza di megaripple sinuosi misti a barcana
Sono stati osservati numerosi tratti di argine in erosione localizzati, in genere, sui lati concavi del canale dove maggiormente agisce l’effetto della corrente (Fig. 3.5.2.2b). Tra queste aree quelle dove la corrente agisce più attivamente sono quelle comprese tra Occhiobello e Pontelagoscuro e tra Garofolo e Polesella. Esse si identificano con la presenza di varie nicchie di distacco, di fenomeni d’instabilità gravitativa e di gradini morfologici.
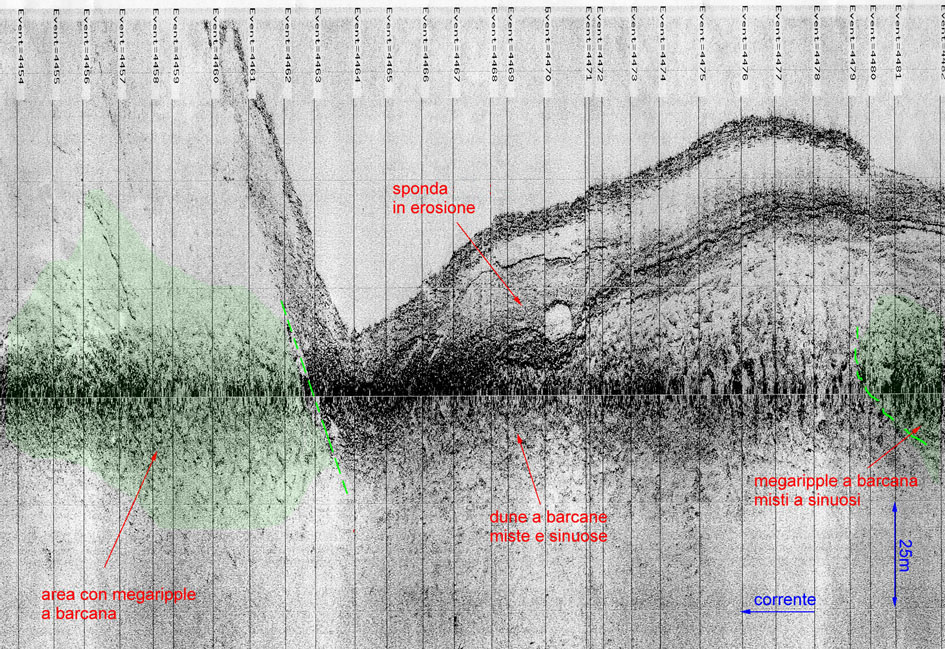
Fig. 3.5.2.2b - Esempio di registrazione “Side Scan Sonar” di un’area caratterizzata da forme di fondo discontinue a barcana a monte di Francolino
In generale l’andamento delle sponde indagate dal rilievo è apparso abbastanza concordante con quello della base topografica del 1988 rilevata dal Genio Civile per il Po. Gli unici tratti che si discostano notevolmente da tale base topografica sono i seguenti:
- zona di ansa tra Revere e Melara dove la sponda destra appare spostata di circa 100 m all’esterno aumentando la sezione fluviale in quel punto;
- zona a valle di Felonica in corrispondenza dell’estremità meridionale dell’isola di Streggia. Qui la sponda destra appare più estesa verso l’esterno aumentando la sezione fluviale di più di 100 m, e non mostra più una piccola barra che dalla sponda si estendeva verso il centro del fiume;
- zona di meandro tra Corbola e Bottrighe dove la sponda sinistra appare con andamento lineare e non mostra più alcune piccole penisole che prima la caratterizzavano.
I tipi di deposito di accumulo rilevati sono i seguenti:
- barre (vedi § 3.5.2.1)
- accumuli da ostacolo
- accumuli in corrispondenza di affluenti
I depositi d’accumulo da ostacolo sono costituiti dall’addensarsi di clasti di dimensioni leggermente minori dell’ostacolo nella sua parte a monte (sopracorrente) e dal raggruppamento di granuli o altri sedimenti fini nella sua scia sottocorrente (Billi, 1988). Tali tipi di deposito si osservano attorno ai piloni dei ponti dove si verifica erosione ed allo stesso tempo deposizione localizzata (Fig. 3.5.2.3a). Questi consistono in una tasca d’erosione a forma di mezzaluna che si sviluppa subito a monte e parzialmente ai fianchi dell’ostacolo che perturbando il flusso, e genera un accumulo di sedimenti fini di scia. Questi depositi sono il risultato di fenomeni localizzati di turbolenza a piccola scala intorno ad un ostacolo fermo in condizioni di energia relativamente alta della corrente. Sul fronte sopra corrente dell’ostacolo si sviluppa un gradiente di pressione al quale il fluido risponde muovendosi verso il basso e lateralmente secondo un sistema di vortici che generano a monte dell’ostacolo l’escavazione della tipica tasca d’erosione. Queste strutture sono ottimi indicatori della direzione locale della corrente. Tali aree possono raggiungere anche una notevole estensione areale con forme di fondo da corrente. In particolare i depositi di accumulo da ostacolo di maggior estensione, sviluppati nelle zone d’ombra dei piloni dei ponti, sono i seguenti:
area sottocorrente del ponte della Strada Statale Romea che collega Contarina con Taglio di Po (Fig. 3.5.2.3b)
area sottocorrente del ponte di Polesella lungo la Strada provinciale che collega Ro con Polesella;
area sottocorrente del ponte di Ca’ Venier.
Fig. 3.5.2.3a - Rappresentazione schematica dei depositi da ostacolo in sezione longitudinale a) e in pianta b), (Billi, 1988)
In corrispondenza della foce del Torrente Panaro all’arrivo nel fiume Po a valle di Ficarolo è stato rilevato un accumulo sedimentario nella zona centrale appena all’esterno dell’asta del torrente. Tale corpo sedimentario ha estensione di circa 50 m per 30 m ed un dislivello di qualche metro ed è il risultato della perdita di energia della corrente del Torrente Panaro quando si immette nel Po.
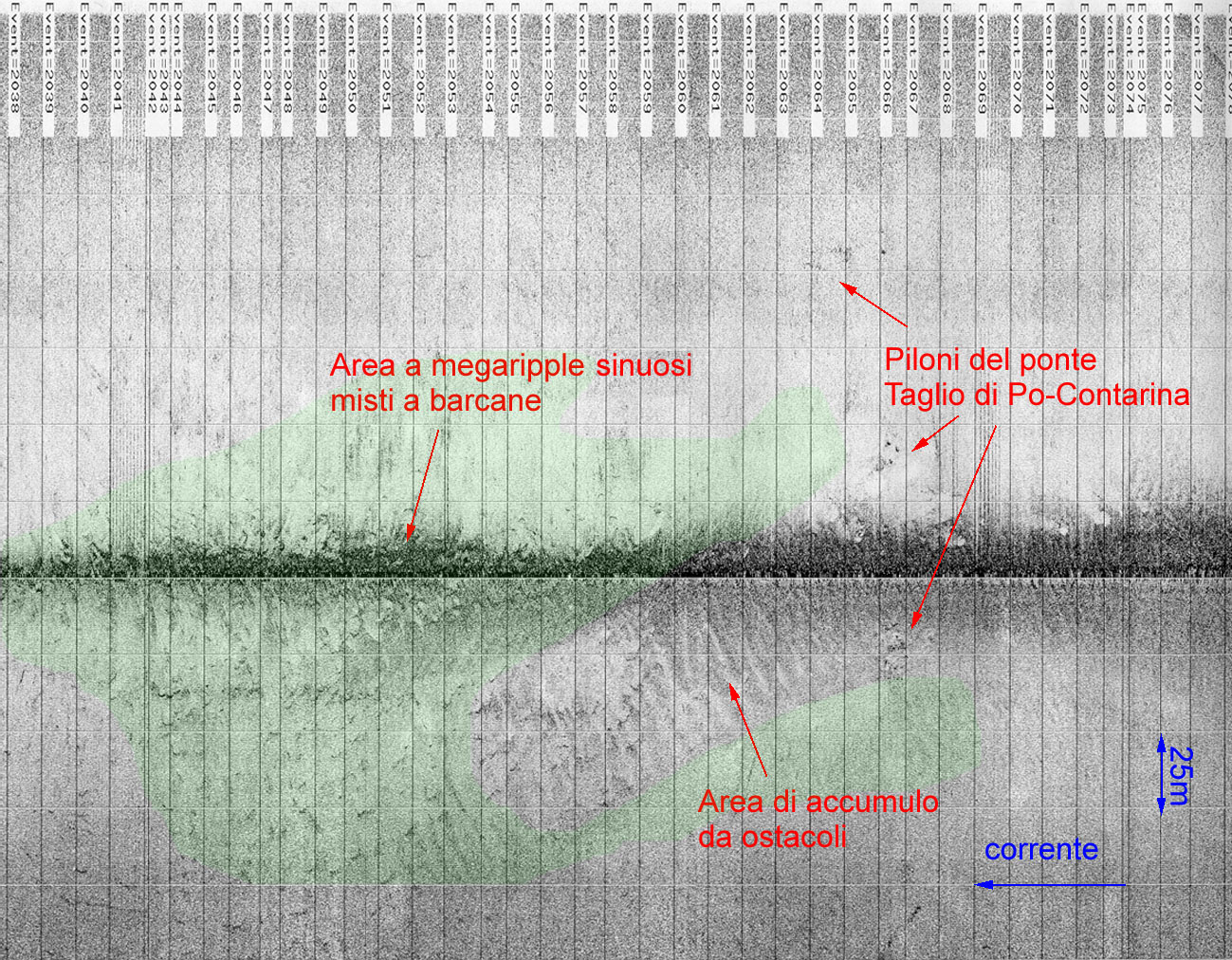
Fig. 3.5.2.3b - Esempio di deposito di accumulo da ostacolo dietro i piloni della Strada Statale Romea nel punto di collegamento tra Contarina e Taglio di Po. Si noti la presenza di megaripple con andamento sinuoso sulla superficie del deposito
La presenza di materiali grossolani alluvionali che costituiscono il substrato dell’alveo ha comportato una penetrazione del segnale sismico ad alta frequenza del “Chirp” e dell’”Uniboom” solo fino alla profondità di pochi metri sotto il fondo (Fig. 3.5.3). Ciò non ha permesso di ottenere indicazioni utili all’interpretazione stratigrafica.
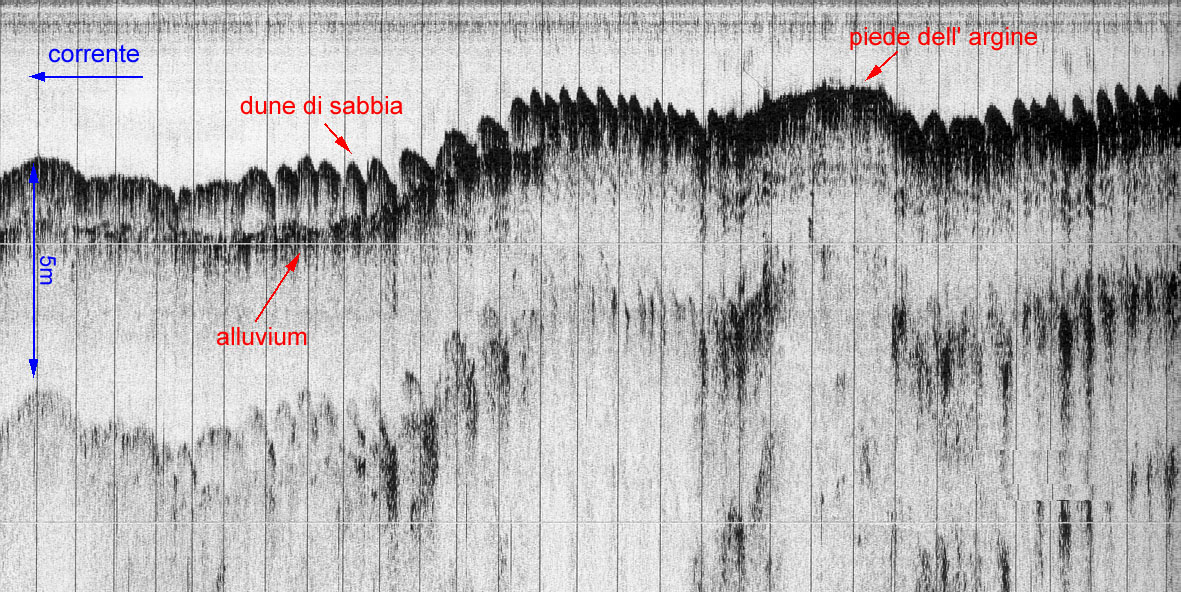
Fig. 3.5.3 - Esempio di registrazione “Sub Bottom Profiler” (tecnologia “Chirp”)