The vessel was set-up for data acquisition and navigation with RESON PDS-2000 and COMM-TECH NAVPRO softwares. Two workstations were used for
The latter workstation also collected the navigational data every minute and at different sampling rates.
The Positioning system NAVPRO V5.6 provided by Communication Technology (Cesena, Italy) was used. The integrated system used a Microtecnica Gyrocompass, and a Trimble 4000 Differential Locator, with a DGPS Satellite link by FUGRO. Instruments were interfaced by a Digiboard Multi Serial I/O.
The datum WGS84 and the UTM projection on 39E (zone 37) were chosen for navigation and display purposes. Timing was set to UTC whereas the acquisition rate was set to 10 secs. The SBP-CHIRP workstation received the 'VESSEL(0,0)' positions by the NAVPRO serial output. The positions were therefore recorded on the SEGY trace headers. The speed of sound for echosouder ATLAS-KRUPP DESO 25 (33Khz) was set at 1535m/sec, with a transducer immersion of 3.8m.
The NAVPRO computer also interfaced an ANDERAA metereological station and a conductivity/temperature sensor at the keel (depth of 3.5m), and the data were collected at the same rate as above.
The navigation system PDS-2000 V2.3.4.35 by RESON was used for Multibeam data acquisition. The system interfaced the RESON 8160 Operator's console, an OCTANS gyrocompass and MRU, and the Trimble 4000 DGPS receiver.
The RESON 8160 MBES sonar head was positioned by sub on the ship's keel using a V-shaped steel frame, and the cable's dry end passed trough a pipe after water-proofness. The sound velocity probe at the Sonar Head went out of service immediately after departure from Naples. We therefore were bound to use the Conductivity/Temperature data at the keel provided by the ANDERAA Metereological Data Logger. The data obtained were converted to speed of sound and input manually into the Multibeam Console.
An RDI ADCP @300Khz was in operation throughout the research cruise in the Red Sea. The positioning and attitude data were provided by a 4 antenna Ashtec GPS.
A Geometrics G811 Magnetometer tow fish was towed 200m astern, on the port side.
A seismic source Array was towed 25 m astern, and the first active section of the 48 Ch. seismic streamer was towed 150 m astern.
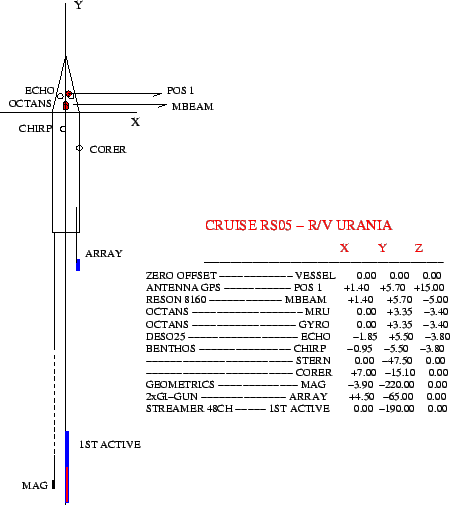
The instrumental offsets are presented in Fig. 9 and in Tab. 3.
figure